![]()
Sciurus17のURDFファイルを含むROSパッケージです。
このROSパッケージはrt-net/sciurus17_rosから分離しました。
詳細はrt-net/sciurus17_ros#134を見てください。
- Melodic
- Noetic
# 本パッケージをクローンし、依存関係をインストールする
cd ~/catkin_ws/src
git clone https://github.com/rt-net/sciurus17_description
rosdep install -r -y -i --from-paths .
# パッケージをビルドする
cd ~/catkin_ws
catkin_make
source devel/setup.bash次のコマンドを実行するとRViz上にSciurus17のモデルが表示されます
roslaunch sciurus17_description display.launch 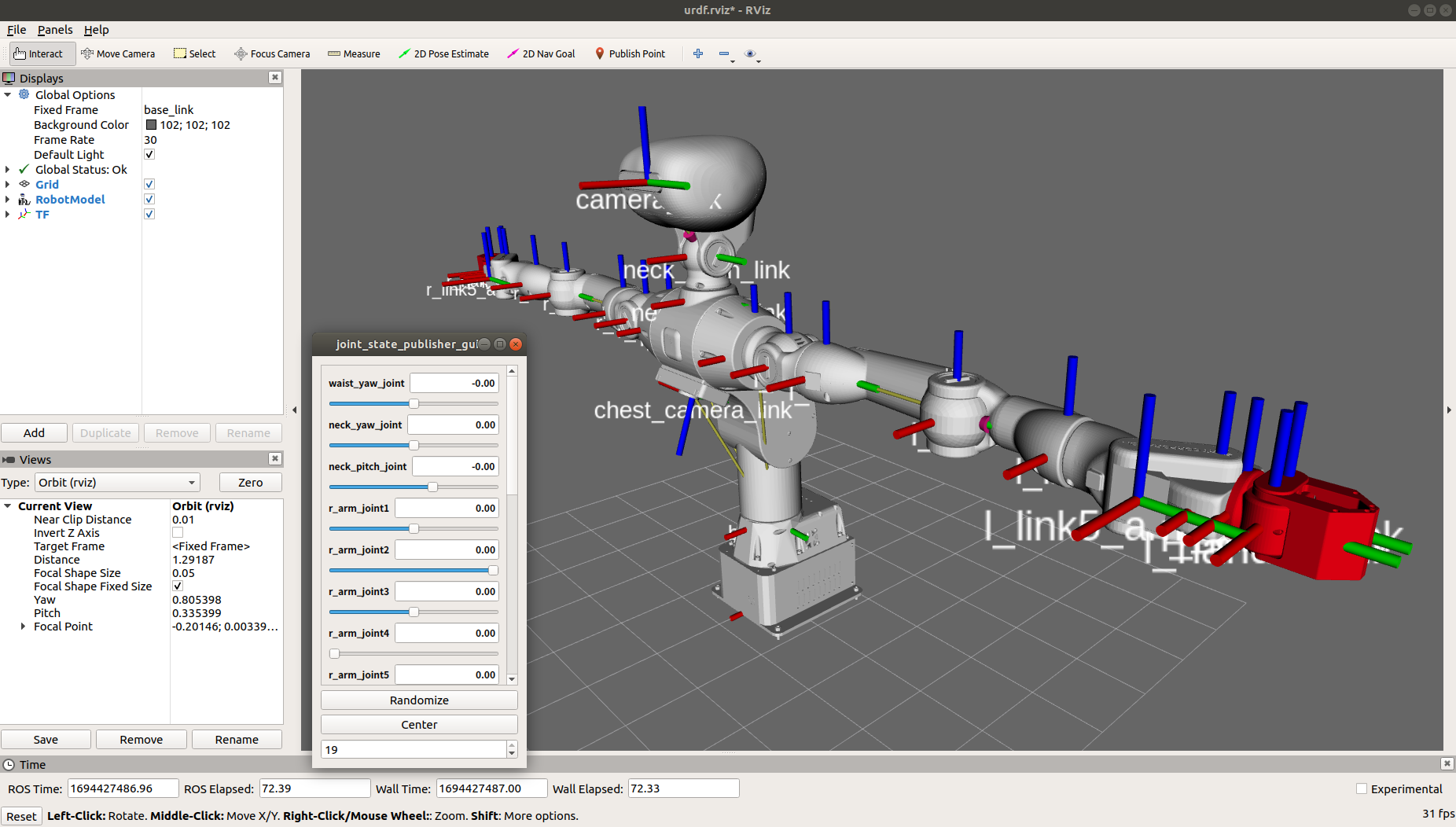
Sciurus17は、アールティが開発した研究用上半身ロボットです。 このリポジトリのデータ等に関するライセンスについては、LICENSEファイルをご参照ください。 企業による使用については、自社内において研究開発をする目的に限り、本データの使用を許諾します。 本データを使って自作されたい方は、義務ではありませんが弊社ロボットショップで部品をお買い求めいただければ、励みになります。 商業目的をもって本データを使用する場合は、商業用使用許諾の条件等について弊社までお問合せください。
サーボモータのXM540やXM430に関するCADモデルの使用については、ROBOTIS社より使用許諾を受けています。 Sciurus17に使用されているROBOTIS社の部品類にかかる著作権、商標権、その他の知的財産権は、ROBOTIS社に帰属します。