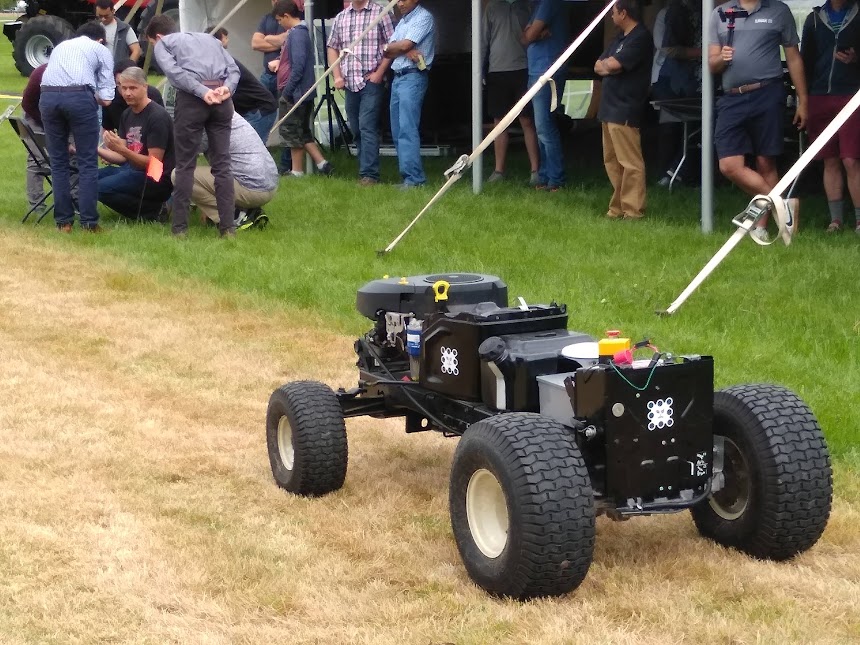
This repository aims to compile the work and software for self driving a lawn tractor, it's our first community project and was suggested by a rancher in Texas, Al Jones. As an example of implementation we have automated a small lawn tractor, using low-cost open source components to learn the principles of robotics. The widely available lawn tractor platform with many attachments and open source approach reduces the barrier of entry of using robotics in agriculture.
{kind=link}
{kind=link}
From this community initiative we obtained the following products and tools:
- Lawn Tractor Simulator. A stage_ros implementation, that is a great training tool for learning ROS in an agricultural environment and with lawn tractor. At the Lawn Tractor Simulator page you will find all the imformation.
This is an open project and you are invited to work in it with the team. Present yourself on one of the following platforms: the Discourse group.
lawn_tractor is released under the MIT license.
Any user of this software shall indemnify and hold harmless ROS Agriculture OÜ. and its directors, officers, employees, agents, stockholders, affiliates, subcontractors and customers from and against all allegations, claims, actions, suits, demands, damages, liabilities, obligations, losses, settlements, judgments, costs and expenses (including without limitation attorneys’ fees and costs) which arise out of, relate to or result from any use of this software by user.
THIS IS ALPHA QUALITY SOFTWARE FOR RESEARCH PURPOSES ONLY. THIS IS NOT A PRODUCT. YOU ARE RESPONSIBLE FOR COMPLYING WITH LOCAL LAWS AND REGULATIONS. NO WARRANTY EXPRESSED OR IMPLIED.