This work is used for pose estimation(yaw, pitch and roll) by Face landmarks(left eye, right eye, nose, left mouth, right mouth and chin). Roll:+90°:-90°/Pitch:+90°:-90°/Yaw:+90°:-90°, like the picture below:
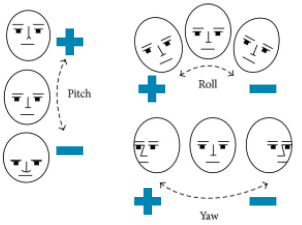
The order of numbers is ROLL, PITCH, YAW:



- I fine-tune the MTCNN into the output of 6 landmark feature points, reference and make some adjustments in this article 'Head Pose Estimation using OpenCV and Dlib'.
- Because the MTCNN's eyes are the middle of the position rather than the corner of the eye, so we modify the world coordinate(model point) from original to (-150.0, -150.0, -125.0)# Left Mouth corner/(150.0, -150.0, -125.0)# Right mouth corner
- Modify the camera matrix's focal_length from original to img_size[1]/2 / np.tan(60/2 * np.pi / 180).
- imgpts, jac = cv2.projectPoints(axis, rotation_vector, translation_vector, camera_matrix, dist_coeffs)
- modelpts, jac2 = cv2.projectPoints(model_points, rotation_vector, translation_vector, camera_matrix, dist_coeffs)
- rvec_matrix = cv2.Rodrigues(rotation_vector)[0]
- proj_matrix = np.hstack((rvec_matrix, translation_vector))
- eulerAngles = cv2.decomposeProjectionMatrix(proj_matrix)[6]
- pitch, yaw, roll = [math.radians(_) for _ in eulerAngles]
- pitch = math.degrees(math.asin(math.sin(pitch)))
- roll = -math.degrees(math.asin(math.sin(roll)))
- yaw = math.degrees(math.asin(math.sin(yaw)))