TurtleBot3 is a Robot Operating System standard platform robot. Here we develop a TurtleBot3 controlled by unsupervised induced models, as well as by partially or wholly supervised conditioned models. We demonstrate that it is possible for the TurtleBot3 to learn about its environment without any predefined label or goal, and then to apply this knowledge to accomplish a task.
The model is trained using the inducers and conditioners implemented in the AlignmentRepaC repository. The AlignmentRepaC repository is a fast C++ implementation of some of the practicable inducers described in the paper The Theory and Practice of Induction by Alignment at https://greenlake.co.uk/. The models are induced in the main executable, which can run without the need to install TurtleBot3.
The history (training data) is collected by running various controllers in the turtlebot3 house simulated in the Gazebo virtual environment.
Download, build and run main executable
Download, build and run TurtleBot3 nodes
To run the non-ROS main executable it is only necessary to install the AlignmentRepaC repository and its underlying repositories. The AlignmentRepaC module requires modern C++ version 17 or later to be installed.
For example, in Ubuntu bionic (18.04),
sudo apt-get update -y && sudo apt install -y git g++ cmake
Then download the zip files or use git to get the TBOT01 repository and the underlying rapidjson, AlignmentC and AlignmentRepaC repositories -
cd
git clone https://github.com/Tencent/rapidjson.git
git clone https://github.com/caiks/AlignmentC.git
git clone https://github.com/caiks/AlignmentRepaC.git
git clone https://github.com/caiks/TBOT01.git
Then download the TBOT01 workspace repository -
git clone https://github.com/caiks/TBOT01_ws.git
cd ~/TBOT01_ws
cat data008a* >data008.bin
cat data009a* >data009.bin
cat data010a* >data010.bin
cat data011a* >data011.bin
cat data013a* >data013.bin
cat data015a* >data015.bin
cat data016a* >data016.bin
Then build -
cd
cp TBOT01/CMakeLists_noros.txt TBOT01/CMakeLists.txt
mkdir TBOT01_build
cd TBOT01_build
cmake -DCMAKE_BUILD_TYPE=RELEASE ../TBOT01
make
The main executable has various modes. Note that the induce and condition modelling modes can require up to 24GB of memory depending on the parameterisation,
cd ../TBOT01_ws
ln -s ../TBOT01_build/main main
./main stats data001
./main stats data002_room1
./main stats data002_room4
./main stats data003
./main stats data008
./main stats data009
./main bitmap data001
./main bitmap data001 3
./main bitmap data002_room1
./main bitmap data003
./main bitmap data003 10
./main bitmap data003 10 0 59
./main bitmap data005 10 0 59
./main bitmap data008 10 0 59
./main bitmap data009 10 0 59
./main bitmap_average data001
./main bitmap_average data002_room1 20
./main bitmap_average data002_room4 20
./main analyse data002
./main analyse data003
./main analyse data006_01
./main analyse data006_02
./main analyse data006_03
./main analyse data006_04
./main analyse data006_05
./main analyse data007
./main analyse data008
./main analyse data008 substrate003
./main analyse data008 substrate004
./main analyse data009
./main analyse data009 substrate004
./main analyse data009 substrate005
./main analyse data009 substrate006
./main induce model001 4 >model001.log
./main induce model002 4 >model002.log
./main induce model003 4 >model003.log
./main induce model004 4 >model004.log
./main induce model005 4 >model005.log
./main induce model008 4 >model008.log
./main induce model009 4 >model009.log
./main induce model010 4 >model010.log
./main induce model011 4 >model011.log
./main induce model012 4 >model012.log
./main induce model015 4 >model015.log
./main induce model017 8 >model017.log
./main induce model018 8 >model018.log
./main induce model021 16 1 1 >model021_1_1.log
./main induce model021 16 2 4 >model021_2_4.log
./main induce model021 32 3 4 >model021_3_4.log
./main induce model021 8 1 1 >model021_1_1.log
./main induce model021 8 2 4 >model021_2_4.log
./main induce model023 16 1 1 >model023_1_1.log
./main induce model023 16 2 4 >model023_2_4.log
./main induce model023 8 1 1 >model023_1_1.log
./main induce model024 8 7 2 >model024.log
./main induce model026 8 >model026.log
./main induce model027 32 >model027.log
./main condition model006 4 location >model006_location.log
./main condition model006 4 motor >model006_motor.log
./main condition model006 4 position >model006_position.log
./main condition model007 4 location >model007_location.log
./main condition model007 4 motor >model007_motor.log
./main condition model007 4 position >model007_position.log
./main condition model013 4 location >model013_location.log
./main condition model013 4 motor >model013_motor.log
./main condition model013 4 position >model013_position.log
./main condition model014 4 location >model014_location.log
./main condition model014 4 motor >model014_motor.log
./main condition model014 4 position >model014_position.log
./main condition model016 1 motor >model016_motor.log
./main condition model016 4 location >model016_location.log
./main condition model016 4 motor >model016_motor.log
./main condition model016 4 position >model016_position.log
./main condition model016 8 location >model016_location.log
./main condition model016 8 position >model016_position.log
./main condition model019 8 location >model019_location.log
./main condition model019 8 position >model019_position.log
./main condition model020 8 location 1 1 >model020_location_1_1.log
./main condition model020 8 location 2 4 >model020_location_2_4.log
./main condition model020 8 location 3 4 >model020_location_3_4.log
./main condition model020 8 location 7 4 >model020_location_7_4.log
./main condition model022 16 location 1 1 >model022_location_1_1.log
./main condition model022 16 location 2 4 >model022_location_2_4.log
./main condition model022 8 location 1 1 >model022_location_1_1.log
./main condition model025 8 location 7 2 >model025_location_7_2.log
./main condition model028 8 location >model028_location.log
./main condition model029 8 location_next >model029_location_next.log
./main condition model030 8 location_next >model030_location_next.log
./main condition model031 16 location_next >model031_location_next.log
./main condition model032 16 room_next >model032_room_next.log
./main condition model033 16 room_next >model033_room_next.log
./main condition model034 16 room_next >model034_room_next.log
./main bitmap_model model001
./main bitmap_model model002
./main bitmap_model model003
./main bitmap_model model004
./main bitmap_model model005
./main bitmap_model model009 5 data003
./main bitmap_model model012 data003
./main entropy model001 10
./main entropy model001 10 data003
./main entropy model001 100
./main entropy model004 10
./main entropy model005 10
./main entropy model006_location 10
./main entropy model006_motor 10
./main entropy model006_position 10
./main entropy model007_location 10
./main entropy model007_motor 10
./main entropy model007_position 10
./main entropy model008 10
./main entropy model009 1 data004
./main entropy model009 10 data003
./main entropy model010 1 data004
./main entropy model010 10 data003
./main entropy model012 1 data004
./main entropy model012 10 data003
./main entropy model013_location 1 data004
./main entropy model013_location 10 data003
./main entropy model013_motor 10 data003
./main entropy model013_position 10 data003
./main entropy model014_location 1 data004
./main entropy model014_location 10 data003
./main entropy model014_location 10 data004
./main entropy model014_motor 10 data003
./main entropy model014_motor 10 data004
./main entropy model014_position 10 data003
./main entropy model014_position 10 data004
./main entropy model016_location 1 data004
./main entropy model016_location 10 data004
./main entropy model016_motor 10 data004
./main entropy model016_position 10 data004
./main entropy model017 1 data004
./main entropy model017 10 data004
./main entropy model018 1 data004
./main entropy model018 1 data009
./main entropy model019_location 1 data004
./main entropy model019_location 1 data009
./main entropy model020_location_1_1 1 data004 1 1
./main entropy model027 1 data009
./main entropy model028_location 1 data009
./main entropy model029_location_next 1 data009 substrate003
./main entropy model030_location_next 1 data009 substrate003
./main entropy model031_location_next 1 data009 substrate003
./main entropy model032_room_next 1 data009 substrate004
./main entropy model033_room_next 1 data009 substrate004
./main entropy model034_room_next 1 data009 substrate004
./main entropy_region model011 1 data004
./main entropy_region model011 1 data004 1
./main entropy_region model011 1 data009
./main entropy_region model015 1 data004
./main entropy_region model015 1 data004 1
./main entropy_region model026 1 data009
./main entropy_region_sequence model024 1 7 2
./main entropy_sequence model020_location_1_1 1 data004 1 1
./main entropy_sequence model020_location_2_4 1 data004 2 4
./main entropy_sequence model020_location_3_4 1 data004 3 4
./main entropy_sequence model020_location_7_4 1 data004 7 4
./main entropy_sequence model021_1_1 1 data004 1 1
./main entropy_sequence model021_2_4 1 data004 2 4
./main entropy_sequence model021_3_4 1 data004 3 4
./main entropy_sequence model022_location_1_1 1 data004 1 1
./main entropy_sequence model022_location_2_4 1 data004 2 4
./main entropy_sequence model023_1_1 1 data004 1 1
./main entropy_sequence model023_2_4 1 data004 2 4
./main entropy_sequence model025_location_7_2 1 data004 7 2
./main entropy_room_next model027 data009
./main entropy_room_next model028_location data009
./main entropy_room_next model029_location_next data009
./main entropy_room_next model030_location_next data009
./main entropy_room_next model031_location_next data009
./main entropy_room_next model032_room_next data009
./main entropy_room_next model033_room_next data009
./main entropy_room_next model034_room_next data009
./main observe data003 model016_location data004 location
./main observe data003 model016_location data004 location 0 59
./main observe data003 model016_position data004 position
./main observe data003 model017 data004 location
./main observe data003 model017 data004 location 0 59
./main observe data003 model017 data004 position
./main observe data004_04 model016_location data004 location
./main observe data004_04 model017 data004 location
./main observe data005 model016_location data004 location
./main observe data005 model016_location data004 location 0 59
./main observe data005 model016_position data004 position
./main observe data005 model017 data004 location
./main observe data005 model017 data004 position
./main observe data005 model018 data004 location
./main observe data005 model018 data004 position
./main observe data005 model019_location data004 location
./main observe data005 model019_position data004 position
./main observe data008 model018 data009 location
./main observe data008 model019_location data009 location
./main observe data008 model027 data009 location
./main observe data008 model028_location data009 location
./main observe data008 model029_location_next data009 location 0 0 substrate003
./main observe data008 model029_location_next data009 location_next 0 0 substrate003
./main observe data008 model030_location_next data009 location 0 0 substrate003
./main observe data008 model030_location_next data009 location_next 0 0 substrate003
./main observe data008 model031_location_next data009 location 0 0 substrate003
./main observe data008 model031_location_next data009 location_next 0 0 substrate003
./main observe data008 model032_room_next data009 location 0 0 substrate004
./main observe data008 model032_room_next data009 location_next 0 0 substrate004
./main observe data008 model032_room_next data009 room_next 0 0 substrate004
./main observe data008 model033_room_next data009 location 0 0 substrate004
./main observe data008 model033_room_next data009 location_next 0 0 substrate004
./main observe data008 model033_room_next data009 room_next 0 0 substrate004
./main observe data008 model034_room_next data009 location 0 0 substrate004
./main observe data008 model034_room_next data009 location_next 0 0 substrate004
./main observe data008 model034_room_next data009 room_next 0 0 substrate004
./main observe_bitmap data003 model009 data003 10 0 59
./main observe_bitmap data003 model010 data003 10 0 59
./main observe_bitmap data003 model012 data003 10 0 59
./main observe_bitmap data003 model013_location data003 10 0 59
./main observe_bitmap data003 model014_location data003 10 0 59
./main observe_bitmap data003 model016_location data004 10 0 59
./main observe_bitmap data003 model017 data004 10 0 59
./main observe_bitmap data005 model016_location data004 10 0 59
./main observe_bitmap data005 model017 data004 10 0 59
./main observe_bitmap data005 model018 data004 10 0 59
./main observe_bitmap data005 model019_location data004 10 0 59
./main observe_sequence data005 model020_location_1_1 data004 location 1 1
./main observe_sequence data005 model020_location_2_4 data004 location 2 4
./main observe_sequence data005 model020_location_3_4 data004 location 3 4
./main observe_sequence data005 model020_location_7_4 data004 location 7 4
./main observe_sequence data005 model021_1_1 data004 location 1 1
./main observe_sequence data005 model021_2_4 data004 location 2 4
./main observe_sequence data005 model021_3_4 data004 location 3 4
./main observe_sequence data005 model022_location_1_1 data004 location 1 1
./main observe_sequence data005 model022_location_2_4 data004 location 2 4
./main observe_sequence data005 model023_1_1 data004 location 1 1
./main observe_sequence data005 model023_2_4 data004 location 2 4
./main observe_sequence data005 model025_location_7_2 data004 location 7 2
./main room_expected data003 room1
./main room_expected data004 room1
./main room_expected data008 room1
./main room_expected data008 room5
./main room_expected data009 room1
./main room_expected data009 room5
./main room_expected data009 room5 17 data010
./main room_expected data009 room5 17 data011
./main room_expected data009 room5 17 data012
./main room_expected data009 room5 17 data019
./main room_expected data010 room5 17 data020
./main room_expected data010 room5
./main room_expected data010 room5 17 data015
./main room_expected data011 room5
./main room_expected data011 room5 17 data016
./main room_expected data019 room5 17 data018
To run the turtlebot it is necessary to install ROS2, Gazebo and TurtleBot3 on a machine with a GPU and at least 4GB of memory.
For example on AWS EC2 start a g2.2xlarge Ubuntu bionic (18.04) instance.
Set the enivronment variables required by ssh,
[email protected]
k=kp01.pem
Then connect with X11 forwarding enabled,
ssh -X -i $k $h
Then install as follows,
sudo apt-get update -y && sudo apt install -y g++ xorg gedit
sudo reboot
ssh -X -i $k $h
sudo apt install -y ubuntu-drivers-common && sudo ubuntu-drivers autoinstall
sudo reboot
ssh -X -i $k $h
nvidia-smi -q | head
The GPU drivers should be working at this point.
For example, test the GPU with GLX gears,
sudo apt-get install -y mesa-utils
glxgears
There should be a set of cogs smoothly rotating.
The EC2 instance is ready to proceed with the remainder of the installation.
Another example is an instance of a Windows 10 machine with a GPU, running WSL2.
Install Ubuntu 18.04.
Check the virtual machine is running at WSL2 in admin powershell
wsl -l -v
Launch Ubuntu, create the user and then prepare it for Xwindows. Add the following line to ~/.bashrc,
export DISPLAY=$(cat /etc/resolv.conf | grep nameserver | awk '{print $2}'):0
Install Xwindows,
source ~/.bashrc
sudo apt update
sudo apt install -y g++ xorg gedit
Install VcVsrv.
Run Xlaunch: reset Native opengl and set Disable access control.
Test with xeyes.
Note that Windows Firewall may be blocking, see microsoft/WSL#4171 (comment)
Now install Gazebo9,
sudo apt-get install -y gazebo9 libgazebo9-dev
gazebo -v
Install ROS2 Eloquent,
sudo apt install -y curl gnupg2 lsb-release
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros2-latest.list'
sudo apt update
sudo apt install -y ros-eloquent-desktop ros-eloquent-gazebo-* ros-eloquent-cartographer ros-eloquent-cartographer-ros
echo "source /opt/ros/eloquent/setup.bash" >> ~/.bashrc
source ~/.bashrc
Test by running these nodes in separate shells,
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
Install TurtleBot3,
sudo apt install -y python3-argcomplete python3-colcon-common-extensions google-mock libceres-dev liblua5.3-dev libboost-dev libboost-iostreams-dev libprotobuf-dev protobuf-compiler libcairo2-dev libpcl-dev python3-sphinx python3-vcstool
mkdir -p ~/turtlebot3_ws/src
cd ~/turtlebot3_ws
wget https://raw.githubusercontent.com/ROBOTIS-GIT/turtlebot3/ros2/turtlebot3.repos
vcs import src < turtlebot3.repos
colcon build --symlink-install
echo 'source ~/turtlebot3_ws/install/setup.bash' >> ~/.bashrc
echo 'export ROS_DOMAIN_ID=30 #TURTLEBOT3' >> ~/.bashrc
source ~/.bashrc
echo 'export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/turtlebot3_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models' >> ~/.bashrc
source ~/.bashrc
export TB3_MODEL=burger
export TURTLEBOT3_MODEL=${TB3_MODEL}
To test launch one of these worlds,
ros2 launch turtlebot3_gazebo empty_world.launch.py
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
Then in a separate shell,
export TB3_MODEL=burger
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_teleop teleop_keyboard
Check that you can steer the turtlebot using the w/x and a/d keys.
Now download and build the TBOT01 repository and the underlying rapidjson, AlignmentC and AlignmentRepaC repositories -
cd ~/turtlebot3_ws/src
git clone https://github.com/Tencent/rapidjson.git
git clone https://github.com/caiks/AlignmentC.git
git clone https://github.com/caiks/AlignmentRepaC.git
git clone https://github.com/caiks/TBOT01.git
git clone https://github.com/caiks/TBOT01_ws.git
cd ~/turtlebot3_ws/src/TBOT01_ws
cat data008a* >data008.bin
cat data009a* >data009.bin
cat data010a* >data010.bin
cat data011a* >data011.bin
cat data013a* >data013.bin
cat data015a* >data015.bin
cat data016a* >data016.bin
cd ~/turtlebot3_ws/src
mkdir AlignmentC_build AlignmentRepaC_build
cd ~/turtlebot3_ws/src/AlignmentRepaC_build
cmake -DCMAKE_BUILD_TYPE=RELEASE ../AlignmentRepaC
make AlignmentC AlignmentRepaC
cd ~/turtlebot3_ws/src/TBOT01
cp CMakeLists_ros.txt CMakeLists.txt
cd ~/turtlebot3_ws
colcon build --packages-select TBOT01
source ~/.bashrc
The simulation can be started in paused mode,
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/turtlebot3_ws/src/TBOT01_ws/gazebo_models
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env001.model -s libgazebo_ros_init.so
In a separate shell,
cd ~/turtlebot3_ws/src/TBOT01_ws
ros2 run TBOT01 controller data.bin 250
Press play in gazebo and the turtlebot3 will start moving.
To run the non-ros main executable, create a link,
cd ~/turtlebot3_ws/src/TBOT01_ws
ln -s ~/TBOT01_build/main main
Now let us investigate various turtlebot models and controllers.
Sensors, motors, environment and the collision avoidance controller
Models conditioned on location and position
Location and position observer
Modelling with an unbiased controller
In the following, the rooms are numbered 1 to 6 in the turtlebot3 house from top-left to bottom-right,

Let us start the turtlebot from room 4. We set the turtlebot pose in env001.world,
<include>
<pose>-2.0 1.5 0.01 0.0 0.0 0.0</pose>
<uri>model://turtlebot3_burger</uri>
</include>Run the simulation,
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/turtlebot3_ws/src/TBOT01_ws/gazebo_models
cd ~/turtlebot3_ws/src/TBOT01_ws
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env001.model -s libgazebo_ros_init.so
Now run the turtlebot3_drive controller in the turtlebot3_gazebo package (note that the documentation refers to ROS1 but we are using ROS2).
In a separate shell, run
ros2 run turtlebot3_gazebo turtlebot3_drive
The turtlebot moves around room 4 before moving to the corridor between room 4 and room 1. It passes through the front door and will carry on indefinitely outside.
Note that in this simulation and the others below, small variations in the timing of the messages sent from the controller can cause quite large differences in the turtlebot's path after a few minutes, so these experiments are not exactly reproducible.
The Turtlebot3Drive node does simple collision avoidance. It subscribes to the lidar scan and odometry odom topics, and publishes to the motor cmd_vel topic. It runs a timer every 10 ms which calls a callback where the direction is decided. The scan data is first checked at 0 deg. If there is an obstacle ahead it turns right. If there is no obstacle ahead the scan data is checked at 30 deg. If there is an obstacle to the left it turns right. If there is no obstacle ahead nor to the left, the scan data is checked at 330 deg. If there is an obstacle to the right it turns left. If there are no obstacles ahead, left or right, it drives straight ahead. Once the direction is decided a geometry_msgs::msg::Twist is published to cmd_vel either with (a) a linear motion at 0.7 m/s, or (b) a rotation clockwise or anti-clockwise at 1.5 rad/s. While rotating the controller waits until the orientation has changed by 30 deg before the direction is decided again.
In general the turtlebot3_drive controller does not collide very often with the walls, but can sometimes collide with table legs. There is a preference for right turns over left, so overall motion is usually clockwise.
For our investigations we copied the turtlebot3_drive controller to the TBOT01 controller and added extra functionality.
Restart the simulation and in a separate shell run the controller,
ros2 run TBOT01 controller data.bin 250
If there are only two arguments the TBOT01 controller behaves like turtlebot3_drive but will in addition regularly write records defined by the Record structure in dev.h,
struct Record
{
...
std::size_t id;
double ts;
double sensor_pose[7];
double sensor_scan[360];
double action_linear;
double action_angular;
};sensor_pose records the odometry, sensor_scan records the lidar, and action_linear and action_angular records the motor action. In this case the records are written to data.bin every 250 milliseconds.
Run TBOT01 for around 1 minute. Stop it by killing the controller to close the records file, and then by pressing pause in Gazebo to pause the simulation. If the turtlebot did not collide with the letterbox it should have completely left the grounds of the house. Let us examine the records generated,
./main stats data
The stats procedure reads the data.bin records file and writes some statistics. This is a typical output,
rr->size(): 253
rr->front().id: 0
rr->front().ts: 19.0016
rr->front(): (0,19.0016,(-1.99886,1.49979,0.00845354,0.000297038,0.000926921,-0.217572,0.976044),(3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,2.01354,1.96314,1.98215,1.96017,1.96184,1.96562,1.93584,1.93213,1.93106,1.9239,1.92403,1.92239,1.91795,1.88348,1.90323,1.90979,1.91851,1.90812,1.89889,1.9007,1.89326,1.89709,1.91238,1.90077,1.91721,1.92671,1.91716,1.93235,1.94111,1.93617,1.97552,1.94811,1.94905,1.95598,1.98973,1.98053,1.97897,2.01857,2.01352,2.04063,2.04114,2.04763,2.06706,2.09635,2.12213,2.12722,2.14704,2.18101,2.18564,2.22145,2.24016,2.29842,2.27368,2.31563,2.36267,2.36403,2.40737,2.43636,2.46838,2.5098,2.53441,2.59356,2.65222,2.67643,2.72652,2.77643,2.82835,2.89304,2.93364,3.00006,3.07087,3.13889,3.23378,3.28294,3.39114,3.47619,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,0.528108,0.504098,0.514605,0.523534,3.5,1.25786,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,1.81209,1.85076,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,1.40073,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.10323,3.09248,3.07916,3.08373,3.07512,3.07921,3.05579,3.06363,3.06089,3.06902,3.0359,3.04713,3.06089,3.04551,3.0466,3.0641,3.05288,3.06265,3.0641,3.07791,3.07216,3.08957,3.09638,3.11026,3.12779,3.13265,3.14457,3.16801,3.1955,3.19499,3.22608,3.25486,3.25772,3.29746,3.34152,3.34164,3.35618,3.40821,3.43096,3.41207,3.33215,3.20879,3.11637,3.00932,2.95643,2.87021,2.80742,2.73314,2.68891,2.6187,2.55494,2.49519,2.44635,2.39965,2.37801,2.3376,2.27892,2.24385,2.18804,2.16639,2.12982,2.09373,2.07551,2.0589,2.0005,1.98092,1.95251,1.95438,1.91254,1.88802,1.87863,1.87258,1.84507,1.82271,1.80676,1.80905,1.78896,1.75242,1.76739,1.74944,1.72206,1.71095,1.71031,1.70997,1.69238,1.70132,1.67869,1.66119,1.6465,1.65964,1.64122,1.62384,1.64192,1.62911,1.63626,1.61897,1.63313,1.62052,1.61055,1.60077,1.61647,1.60191,1.62089,1.62285,1.63563,1.61777,1.62076,1.62741,1.62431,1.64093,1.62697,1.62869,1.64159,1.65251,1.64563,1.66283,1.68701,1.69108,1.68016,1.68495,1.71728,1.71172,1.75365,1.7512,1.75205,1.77665,1.79278,1.7878,1.82231,1.85437,1.85655,1.85646,1.88569,1.90832,1.92676,1.96801,1.98336,2.00569,2.0358,2.06591,2.08489,2.12244,2.1499,2.18783,2.22221,2.2514,2.30995,2.34242,2.37791,2.43246,2.48282,2.53853,2.59634,2.65323,2.71388,2.77554,2.84279,2.91219,3.00156,3.08293,3.5,3.5,3.5,3.5),0,-1.5)
rr->back().id: 252
rr->back().ts: 82.0015
rr->back(): (252,82.0015,(9.44059,-8.91209,0.00853602,0.000732516,0.00328479,-0.251896,0.967749),(3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5,3.5),0.3,0)
i: 0
sensor_pose[i].front(): -1.99886
sensor_pose[i].back(): 9.44059
i: 1
sensor_pose[i].front(): -8.91209
sensor_pose[i].back(): 1.49979
i: 2
sensor_pose[i].front(): 0.00831223
sensor_pose[i].back(): 0.00874165
i: 3
sensor_pose[i].front(): -0.00221269
sensor_pose[i].back(): 0.00384245
i: 4
sensor_pose[i].front(): -0.010905
sensor_pose[i].back(): 0.0126168
i: 5
sensor_pose[i].front(): -0.614916
sensor_pose[i].back(): 0.141104
i: 6
sensor_pose[i].front(): 0.788588
sensor_pose[i].back(): 0.999857
sensor_scan.front(): 0.296369
sensor_scan.back(): 3.5
action_linear.front(): 0
action_linear.back(): 0.3
action_angular.front(): -1.5
action_angular.back(): 1.5
sensor_scan.size(): 91080
sensor_scan_dist: {(0.5,2137),(1,7416),(1.5,5537),(2,5330),(2.5,4053),(3,3285),(3.5,63322),(4,0)}
sensor_scan_limit: 59750
i: 0
sensor_scan[i]: 0.296369
i: 4475
sensor_scan[i]: 0.59146
i: 8950
sensor_scan[i]: 0.94238
i: 13425
sensor_scan[i]: 1.34899
i: 17900
sensor_scan[i]: 1.74842
i: 22375
sensor_scan[i]: 2.21977
i: 26850
sensor_scan[i]: 2.85404
i: 31325
sensor_scan[i]: 3.49973
action_linear_dist: {0,0.3}
action_angular_dist: {-1.5,0,1.5}
Here is an example of one we created earlier,
./main stats data001
with output
rr->size(): 279
rr->front().id: 0
rr->front().ts: 0.252699
...
rr->back().id: 278
rr->back().ts: 69.7564
...
i: 0
sensor_pose[i].front(): -1.97511
sensor_pose[i].back(): 4.35613
i: 1
sensor_pose[i].front(): -11.2565
sensor_pose[i].back(): 1.50003
i: 2
sensor_pose[i].front(): 0.0083258
sensor_pose[i].back(): 0.0107955
i: 3
sensor_pose[i].front(): -0.0210602
sensor_pose[i].back(): 0.00900391
i: 4
sensor_pose[i].front(): -0.0261257
sensor_pose[i].back(): 0.0302976
i: 5
sensor_pose[i].front(): -0.972794
sensor_pose[i].back(): 0.150416
i: 6
sensor_pose[i].front(): 0.231651
sensor_pose[i].back(): 0.999958
sensor_scan.front(): 0.12
sensor_scan.back(): 3.5
action_linear.front(): 0
action_linear.back(): 0.3
action_angular.front(): -1.5
action_angular.back(): 1.5
sensor_scan.size(): 100440
sensor_scan_dist: {(0.5,4391),(1,17001),(1.5,8267),(2,5194),(2.5,2919),(3,2160),(3.5,60508),(4,0)}
sensor_scan_limit: 58317
i: 0
sensor_scan[i]: 0.12
i: 6017
sensor_scan[i]: 0.524778
i: 12034
sensor_scan[i]: 0.644876
i: 18051
sensor_scan[i]: 0.848718
i: 24068
sensor_scan[i]: 1.1434
i: 30085
sensor_scan[i]: 1.53067
i: 36102
sensor_scan[i]: 2.18768
i: 42119
sensor_scan[i]: 3.49977
action_linear_dist: {0,0.3}
action_angular_dist: {-1.5,0,1.5}
We can visualise the scan data in a bitmap,
./main bitmap data
Open data.bmp in an image viewer. The 360 scan rays are represented horizontally with 0 deg in the centre. The brightness indicates the distance detected, brighter for foreground objects and darker for background. It is black where there are no obstacles within the 3.5 m maximum range of the lidar. The time axis is vertical from bottom to top. Here is the image for data001,

We can see the turtlebot zig-zagging around frequently in the corridor and less often outside the house, until all obstacles are out of range of the lidar sensor.
Generate an average of the records,
./main bitmap_average data001
and view it in data001_average.bmp,

Now let us close the door by placing an obstacle there. We will also remove tables and chairs. The new turtlebot3_house001 is included in env002.world.
The simulation was restarted,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env002.model -s libgazebo_ros_init.so
and the controller re-run for around 5 minutes,
ros2 run TBOT01 controller data002_room4.bin 250
Again we can examine the statistics,
./main stats data002_room4
Because of its tendency to right turns, the turtlebot stays in in room 4.
Now let us restart the turtlebot in room 1,
<include>
<pose>3.575430 4.271000 0.01 0.0 0.0 0.0</pose>
<uri>model://turtlebot3_burger</uri>
</include>in env003.world.
The simulation was restarted,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env003.model -s libgazebo_ros_init.so
Again the controller is run for around 5 minutes,
ros2 run TBOT01 controller data002_room1.bin 250
Now the turtlebot moves from room 1 to room 4.
Here is the image for data002_room1,

You can view a short video here. In this simulation turtlebot leaves room 1 and goes into room 2.
We repeat for the various rooms in the turtlebot house.
Room 2,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env004.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data002_room2.bin 250
Room 3,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env005.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data002_room3.bin 250
Room 5,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env006.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data002_room5.bin 250
Room 5 from a different starting point,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env007.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data002_room5_2.bin 250
Room 2 again from a different starting point,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env008.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data002_room2_2.bin 250
Now we have acquired some data, let us consider creating a history. The recordListsHistoryRepa_2 function in dev.h creates a HistoryRepa from a list of Record,
SystemHistoryRepaTuple recordListsHistoryRepa_2(int, const RecordList&);The substrate consists of 360 scan variables with bucketed values and a motor variable with values 0,1 and 2 corresponding to left, ahead and right. It also has two variables derived from the odom, a location variable with values door12, door13, door14, door45, door56, room1, room2, room3, room4, room5 and room6, and a position variable with values centre, corner and side.
We can do some analysis of the data files data002_room1.bin, data002_room2.bin, data002_room2_2.bin, data002_room3.bin, data002_room4.bin, data002_room5.bin and data002_room5_2.bin,
./main analyse data002
which has the following output,
hr->dimension: 363
hr->size: 6054
({(<scan,1>,0)},39 % 1)
({(<scan,1>,1)},892 % 1)
({(<scan,1>,2)},885 % 1)
({(<scan,1>,3)},825 % 1)
({(<scan,1>,4)},701 % 1)
({(<scan,1>,5)},685 % 1)
({(<scan,1>,6)},632 % 1)
({(<scan,1>,7)},1395 % 1)
({(<scan,180>,0)},33 % 1)
({(<scan,180>,1)},497 % 1)
({(<scan,180>,2)},777 % 1)
({(<scan,180>,3)},838 % 1)
({(<scan,180>,4)},737 % 1)
({(<scan,180>,5)},767 % 1)
({(<scan,180>,6)},757 % 1)
({(<scan,180>,7)},1648 % 1)
({(motor,0)},100 % 1)
({(motor,1)},5256 % 1)
({(motor,2)},698 % 1)
({(location,door12)},43 % 1)
({(location,door13)},13 % 1)
({(location,door14)},57 % 1)
({(location,door45)},42 % 1)
({(location,door56)},29 % 1)
({(location,room1)},1222 % 1)
({(location,room2)},572 % 1)
({(location,room3)},201 % 1)
({(location,room4)},2763 % 1)
({(location,room5)},161 % 1)
({(location,room6)},951 % 1)
({(position,centre)},1849 % 1)
({(position,corner)},890 % 1)
({(position,side)},3315 % 1)
There are 363 variables and the size is 6054. We show the histograms of the reductions to variables <scan,1>, <scan,180>, motor, location and position.
The scan values are rarely in the first bucket, which is up to 0.5 m, because this is less than the collision avoidance range of 0.7 m. The last bucket, which includes infinity, is the largest. The nearer buckets of <scan,180> are smaller than those of <scan,1> and the further buckets are larger, because the turtlebot moves forward not backward.
We can see from the motor values that the turtlebot generally moves straight ahead and that right turns are preferred to left turns.
From the location and position values we can also see that with this controller the turtlebot tends to end up in the larger rooms, 1 and 4, and mainly skirts around the side of the rooms.
Although the history is not very evenly spatially distributed, let us induce a model of the 360 sensor scan variables,
./main induce model001 4 >model001.log
We can compare this model to the models below by using a proxy for the size-volume scaled component size cardinality sum relative entropy which substitutes a scaled shuffle for the cartesian. As the shuffle is scaled the relative entropy gradually converges, so it is a reasonable proxy for the model likelihood.
./main entropy model001 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 17842.3
We can view a bitmap of the averaged slices in the decomposition tree,
./main bitmap_model model001

If we look at the slices at the root, we can see that objects are generally nearer on the left than on the right. This is explained by turtlebot's tendency to move in a clockwise direction skirting around the sides of the room.
Another property of the slices is that some have near objects ahead, while others have nearer objects at the sides. This is explained by turtlebot's tendency to move in straight lines until a threshold is reached (0.7 m) at which point the turtlebot stops and rotates by 30 degrees.
The child slices of the near-obstacle-ahead slice are divided into whether there is an obstacle on the left, or on the right. TurtleBot looks to the left first, so these child slices are larger.
Now let us drill down into the scan variables. The recordListsHistoryRepaRegion function in dev.h creates a HistoryRepa from a random region of the scan variables,
SystemHistoryRepaTuple recordListsHistoryRepaRegion(int, int, int, const RecordList&);Let us induce a model of regions of 60 scan variables,
./main induce model002 4 >model002.log
./main bitmap_model model002
This is the bitmap,

The random-region slices are considerably more elemental than for the entire 360 degrees panorama.
Model 3 uses a valency of 4 buckets instead of 8. The image can be viewed here. The decomposition is narrower and deeper, but otherwise little different.
{kind=link}
Model 4 goes back to a valency of 8, but has a smaller wmax. The image can be viewed here.
Again, the decomposition is little different.
{kind=link}
Now let us consider a 2-level model. Model 5 is induced from a lower level that consists of the slice variables of 12 model 4 regions every 30 degrees,
./main induce model005 4 >model005.log
./main entropy model005 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 16878.8
The likelihood is a little less than for model 1.
./main bitmap_model model005
This is the bitmap,

The decomposition is narrower and deeper than that of model 1. Near the root there is no slice for near-object-ahead. These alignments are pushed downwards into the children slices.
Now let us condition models on the labels motor, location and position, given the scan substrate,
./main condition model006 4 motor >model006_motor.log
./main entropy model006_motor 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 4532.53
./main condition model006 4 location >model006_location.log
./main entropy model006_location 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 6729.56
./main condition model006 4 position >model006_position.log
./main entropy model006_position 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 5625.21
All of these models are run to zero label entropy. That means that if they were applied to the training history they would have 100% prediction accuracy. The likelihoods of the conditioned models are all considerably lower than the induced models. Note that location is the most complex label, so perhaps it captures more of the alignments.
Now let us run the same set of conditioners on a level that consists of the slice variables of 12 model 4 regions every 30 degrees (which is the same underlying level in model 5 above),
./main condition model007 4 motor >model007_motor.log
./main entropy model007_motor 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 8118.53
./main condition model007 4 location >model007_location.log
./main entropy model007_location 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 14054.9
./main condition model007 4 position >model007_position.log
./main entropy model007_position 10
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 13948.5
All of these also run to zero label entropy but require more fuds to do so. For example, to predict location model 6 requires 421 fuds but model 7 requires 626. From the point of view of these labels, the original substrate is more causal than the random region level. However, the likelihoods of the models conditioned on underlying regional induced models are all higher than those of the models conditioned directly on the substrate.
Now let us use the models we have created to make guesses about the location and position in a ROS node that observes the turtlebot at it moves around the turtlebot house in the gazebo simulation. The TBOT01 observer node is given a model, a label variable and a observe interval. At each observation it applies the model to the current event to determine its slice. The prediction of the label is the most common value of the label variable in the data002 history's slice. The prediction is reported along with the actual value, calculated from the current event's odometry, and a running average of the matches is calculated.
Let us consider models model006_location and model006_position which are conditioned on the label given the scan substrate. The following are run in separate shells,
gazebo -u ~/turtlebot3_ws/src/TBOT01_ws/env002.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data.bin 250
ros2 run TBOT01 observer model006_location location 2500
ros2 run TBOT01 observer model006_position position 2500
The turtlebot is allowed to run around for a while.
This is the output for location,
room4 room4 match 100.000000
room4 unknown fail 80.000000
room4 room4 match 83.333333
room4 room4 match 85.714286
room4 room5 fail 75.000000
room4 room4 match 77.777778
room4 room4 match 80.000000
room4 room4 match 81.818182
room4 room4 match 83.333333
room4 room4 match 84.615385
room4 unknown fail 78.571429
room4 room4 match 80.000000
room4 room4 match 81.250000
room4 room4 match 82.352941
room4 room4 match 83.333333
room4 room4 match 84.210526
room4 room4 match 85.000000
room4 room4 match 85.714286
room4 unknown fail 81.818182
room4 room4 match 82.608696
room4 room4 match 83.333333
room4 room4 match 84.000000
room4 room1 fail 80.769231
room4 room4 match 81.481481
room4 room4 match 82.142857
room4 room4 match 82.758621
room4 room4 match 83.333333
room4 room1 fail 80.645161
room4 room4 match 81.250000
We can see that model006 turtlebot is quite good at guessing that it is in room 4. It sometimes mistakes it for another large room, room 1. In this run, the turtlebot stayed in room 4.
This is the output for position,
centre centre match 100.000000
side side match 100.000000
side corner fail 75.000000
side centre fail 60.000000
centre centre match 66.666667
centre centre match 71.428571
side side match 75.000000
side centre fail 66.666667
side side match 70.000000
centre centre match 72.727273
centre centre match 75.000000
side side match 76.923077
side side match 78.571429
side unknown fail 73.333333
centre centre match 75.000000
centre side fail 70.588235
centre centre match 72.222222
centre side fail 68.421053
centre side fail 65.000000
centre centre match 66.666667
centre side fail 63.636364
side side match 65.217391
side side match 66.666667
side side match 68.000000
corner corner match 69.230769
side side match 70.370370
side side match 71.428571
side side match 72.413793
centre centre match 73.333333
centre centre match 74.193548
centre centre match 75.000000
centre centre match 75.757576
model006 turtlebot is also quite good at guessing its position.
Now let us do another run starting in room 1,
gazebo -u ~/turtlebot3_ws/src/TBOT01_ws/env003.model -s libgazebo_ros_init.so
with location output,
room1 room2 fail 0.000000
room1 room4 fail 0.000000
room1 room1 match 33.333333
room1 room4 fail 25.000000
room1 room4 fail 20.000000
room1 room2 fail 16.666667
room1 room4 fail 14.285714
room1 room1 match 25.000000
door12 door12 match 33.333333
room1 room1 match 40.000000
room1 room1 match 45.454545
room1 room1 match 50.000000
room1 room4 fail 46.153846
room1 unknown fail 42.857143
room1 room1 match 46.666667
room1 room4 fail 43.750000
room1 room4 fail 41.176471
room1 room4 fail 38.888889
room1 room4 fail 36.842105
room1 room4 fail 35.000000
room1 room1 match 38.095238
model006 turtlebot is not so good at guessing that it is in room 1, often mistaking it for room 4. It matches door12 as it approaches.
This is the position output,
centre centre match 100.000000
centre side fail 50.000000
centre centre match 66.666667
centre unknown fail 50.000000
centre centre match 60.000000
centre centre match 66.666667
side side match 71.428571
corner side fail 62.500000
side side match 66.666667
side side match 70.000000
centre centre match 72.727273
centre centre match 75.000000
centre centre match 76.923077
centre centre match 78.571429
side side match 80.000000
side side match 81.250000
side side match 82.352941
centre centre match 83.333333
side side match 84.210526
side side match 85.000000
side side match 85.714286
centre side fail 81.818182
side centre fail 78.2608
This is very similar to the results for room 4.
Now let us do another run starting in room 2,
gazebo -u ~/turtlebot3_ws/src/TBOT01_ws/env004.model -s libgazebo_ros_init.so
with location output,
room2 unknown fail 0.000000
room2 room4 fail 0.000000
room2 room2 match 33.333333
room2 room2 match 50.000000
room2 room2 match 60.000000
room2 room6 fail 50.000000
room2 room3 fail 42.857143
room2 room2 match 50.000000
room2 room3 fail 44.444444
room2 room6 fail 40.000000
room2 room2 match 45.454545
room2 unknown fail 41.666667
room2 room2 match 46.153846
room2 room2 match 50.000000
room2 room2 match 53.333333
room2 room3 fail 50.000000
room2 room2 match 52.941176
room2 room2 match 55.555556
room2 door12 fail 52.631579
room2 unknown fail 50.000000
room2 room4 fail 47.619048
room2 room2 match 50.000000
room2 room2 match 52.173913
model006 turtlebot is better at recognising room 2 than room 1, but not as good as room 4.
This is the position output,
corner centre fail 0.000000
corner corner match 50.000000
side centre fail 33.333333
corner corner match 50.000000
corner corner match 60.000000
side side match 66.666667
side side match 71.428571
centre centre match 75.000000
side unknown fail 66.666667
side side match 70.000000
side centre fail 63.636364
centre centre match 66.666667
centre centre match 69.230769
corner corner match 71.428571
corner corner match 73.333333
side side match 75.000000
side side match 76.470588
side centre fail 72.222222
centre centre match 73.684211
centre centre match 75.000000
side side match 76.190476
corner corner match 77.272727
side corner fail 73.913043
side side match 75.000000
This is very similar to the results for rooms 4 and room 1.
Now let us do another run starting in room 3,
gazebo -u ~/turtlebot3_ws/src/TBOT01_ws/env005.model -s libgazebo_ros_init.so
with location output,
room3 room4 fail 0.000000
room3 unknown fail 0.000000
room3 room2 fail 0.000000
room3 room6 fail 0.000000
room3 unknown fail 0.000000
room3 room3 match 16.666667
room3 unknown fail 14.285714
room3 door14 fail 12.500000
door13 unknown fail 11.111111
room1 room1 match 20.000000
...
The turtlebot moves out of room 3 into room 1 after a few seconds.
model006 turtlebot is poor at recognising room 3. This is because there are only 201 events in data002 in room 3. Compare this to 572 events in room 2, 1222 events in room 1 and 2763 events in 4.
This is the position output,
side unknown fail 0.000000
corner corner match 33.333333
side corner fail 25.000000
side side match 40.000000
side centre fail 33.333333
centre centre match 42.857143
corner centre fail 37.500000
corner corner match 44.444444
corner side fail 40.000000
...
The position results are lower than for the other rooms.
The final run starts in room 5,
gazebo -u ~/turtlebot3_ws/src/TBOT01_ws/env006.model -s libgazebo_ros_init.so
with location output,
room5 room5 match 100.000000
room5 room4 fail 50.000000
door56 unknown fail 33.333333
room5 unknown fail 25.000000
room5 room4 fail 20.000000
room5 unknown fail 16.666667
room5 room5 match 28.571429
room5 room5 match 37.500000
room5 unknown fail 33.333333
room5 door45 fail 30.000000
room5 room5 match 36.363636
door45 unknown fail 33.333333
room4 room1 fail 30.769231
...
The turtlebot moves out of room 5 into room 4 after a few seconds.
model006 turtlebot is poor at recognising room 5, but better than room 3. Again, this is because there are only 161 events in data002 in room 5.
This is the position output,
side unknown fail 0.000000
corner corner match 50.000000
side centre fail 33.333333
side side match 50.000000
side corner fail 40.000000
side unknown fail 33.333333
side side match 42.857143
corner corner match 50.000000
corner corner match 55.555556
side unknown fail 50.000000
side side match 54.545455
side centre fail 50.000000
side centre fail 46.153846
...
The position results are similar to those of room 3.
Now let us see if we can encourage the turtlebot to travel between rooms by removing the bias to the right. We will set an interval that alternates the bias.
The simulation was restarted in room 4,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env002.model -s libgazebo_ros_init.so
and the controller re-run, alternating the bias every 1000 ms,
ros2 run TBOT01 controller data003.bin 250 1000
Now the turtlebot moves between rooms more freely, although it tends to be a little indecisive in corners, especially around the rubbish bin in room 3. After 12 minutes it has visited all of them.
Note that because the left-right preference switches randomly (with the given timescale) the runs are not reproducible at all after the first turn.
Again we can examine the statistics,
./main stats data003
rr->size(): 13381
...
The turtlebot ran for around 55 minutes.
Let us compare the analysis of the data002 and data003 data files,
./main analyse data003
hr->dimension: 363
hr->size: 13381
({(<scan,1>,0)},89 % 1)
({(<scan,1>,1)},2710 % 1)
({(<scan,1>,2)},1928 % 1)
({(<scan,1>,3)},1642 % 1)
({(<scan,1>,4)},1435 % 1)
({(<scan,1>,5)},1234 % 1)
({(<scan,1>,6)},1156 % 1)
({(<scan,1>,7)},3187 % 1)
({(<scan,180>,0)},81 % 1)
({(<scan,180>,1)},1280 % 1)
({(<scan,180>,2)},1549 % 1)
({(<scan,180>,3)},1648 % 1)
({(<scan,180>,4)},1411 % 1)
({(<scan,180>,5)},1363 % 1)
({(<scan,180>,6)},1229 % 1)
({(<scan,180>,7)},4820 % 1)
({(motor,0)},1140 % 1)
({(motor,1)},11096 % 1)
({(motor,2)},1145 % 1)
({(location,door12)},178 % 1)
({(location,door13)},120 % 1)
({(location,door14)},196 % 1)
({(location,door45)},86 % 1)
({(location,door56)},191 % 1)
({(location,room1)},3852 % 1)
({(location,room2)},1307 % 1)
({(location,room3)},925 % 1)
({(location,room4)},3796 % 1)
({(location,room5)},977 % 1)
({(location,room6)},1753 % 1)
({(position,centre)},3478 % 1)
({(position,corner)},3028 % 1)
({(position,side)},6875 % 1)
The distribution of the scan values is very similar to the previous dataset.
We can see from the motor values that the turtlebot generally moves straight ahead as before but now there is no bias for right turns over left turns.
From the location and position values we can also see that with this controller the turtlebot still tends to end up in the larger rooms, 1 and 4, but now there is no bias to room 4 and it spends a larger proportion of its time in the smaller rooms. It still mainly skirts around the side of the rooms, but is more in the corner than before because of its slight indecisiveness. It also seems to have passed through the doorways more often.
Now let us induce a model from the new dataset data003. Model 9 uses the same parameters as model 1,
./main induce model009 4 >model009.log
./main entropy model009 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 40868.9
The size-shuffle sum relative entropy is not comparable because the size of the history is different, but we can compare model 1 using data003 instead of data002,
./main entropy model001 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 37847.2
Unsurprisingly, model 9 is the more likely model given data003.
Here is the bitmap
./main bitmap_model model009 5 data003

Now the bias to the right has disappeared. The main root alignment depends on whether there is a near obstacle to either side or a near obstacle ahead or no near obstacle.
We can look at the effect of increasing fmax from 127 to 512 in model 10,
./main induce model010 4 >model010.log
./main entropy model010 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 41970.1
We can see that there is only a small increase in the likelihood.
Now let us induce a regional model from the new dataset data003. Model 11 uses the same parameters as model 4,
./main induce model011 4 >model011.log
Now let us create the 2-level model. Model 12 is induced from a lower level that consists of the slice variables of 12 model 11 regions every 30 degrees. It has the same parameters as model 5,
./main induce model012 4 >model012.log
./main entropy model012 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 40676.3
The likelihood is a little more than for model 9.
This is the bitmap,
./main bitmap_model model012 5 data003

Now let us condition models on the labels motor, location and position, given the scan substrate. Model 13 has the same parameters as model 6,
./main condition model013 4 motor >model013_motor.log
./main entropy model013_motor 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 12257.1
./main condition model013 4 location >model013_location.log
./main entropy model013_location 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 18075.9
./main condition model013 4 position >model013_position.log
./main entropy model013_position 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 13424.3
Again, all of these models are run to zero label entropy. The likelihoods of the conditioned models are all considerably lower than the induced models. Again, location is the most complex label, because it probably captures more of the alignments.
Now let us run the same set of conditioners on a level that consists of the slice variables of 12 model 11 regions every 30 degrees (which is the same underlying level in model 12 above). Model 14 has the same parameters as model 7,
./main condition model014 4 motor >model014_motor.log
./main entropy model014_motor 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 28086.1
./main condition model014 4 location >model014_location.log
./main entropy model014_location 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 39993.4
./main condition model014 4 position >model014_position.log
./main entropy model014_position 10 data003
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 30755.2
The likelihood of the location conditioned model 14 is almost the same as the induced model 12. We would therefore expect that model 14 will have a similar label accuracy to the substrate conditioned model 13, but be generally more robust.
Now let us test the location and position accuracy of the induced and conditioned models derived from data003.
First we shall run model 13, which is conditioned on the substrate. The simulation was restarted in room 4,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env002.model -s libgazebo_ros_init.so
and the controller re-run, alternating the bias every 1000 ms,
ros2 run TBOT01 controller data004_01.bin 250 1000
ros2 run TBOT01 observer model013_location location 2500
ros2 run TBOT01 observer model013_position position 2500
After around an hour the turtlebot has visited every room. The last few lines from the location observer are
room5 room5 match 59.247889
room5 room4 fail 59.202454
room5 room3 fail 59.157088
room5 room5 match 59.188361
room5 room6 fail 59.143076
room5 room6 fail 59.097859
room5 room4 fail 59.052712
door45 room2 fail 59.007634
room4 room4 match 59.038902
room4 room1 fail 58.993902
room4 room1 fail 58.948972
room4 room1 fail 58.904110
room4 room1 fail 58.859316
room4 room1 fail 58.814590
room4 room1 fail 58.769932
room4 room4 match 58.801214
room4 room4 match 58.832449
room4 room4 match 58.863636
room4 room4 match 58.894777
The model 13 location accuracy is around 59%.
Similarly for the position,
corner corner match 72.371450
corner corner match 72.392638
corner unknown fail 72.337165
corner unknown fail 72.281776
corner side fail 72.226473
centre corner fail 72.171254
side centre fail 72.116119
side centre fail 72.061069
side centre fail 72.006102
centre side fail 71.951220
centre side fail 71.896420
centre centre match 71.917808
side side match 71.939163
side side match 71.960486
side side match 71.981777
side side match 72.003035
side corner fail 71.948446
side side match 71.969697
corner corner match 71.990916
The model 13 position accuracy is around 72%.
Repeating for model 14,
ros2 run TBOT01 controller data004_02.bin 250 1000
ros2 run TBOT01 observer model014_location location 2500 data003
...
room1 room4 fail 63.630184
ros2 run TBOT01 observer model014_position position 2500 data003
...
centre centre match 79.918312
The model 14 location accuracy is a little higher at around 64% and the position accuracy is higher at around 80%.
We can compare the conditioned models, 13 and 14, above to the three induced models 9, 10 and 12,
ros2 run TBOT01 controller data004_03.bin 250 1000
ros2 run TBOT01 observer model009 location 2500 data003
...
room4 room1 fail 39.401294
ros2 run TBOT01 observer model009 position 2500 data003
...
centre centre match 59.902991
The model 9 location accuracy is a considerably lower than either of the conditioned models at around 39% and the position accuracy is also lower at around 60%.
ros2 run TBOT01 controller data004_04.bin 250 1000
ros2 run TBOT01 observer model010 location 2500 data003
...
room2 room1 fail 41.637990
ros2 run TBOT01 observer model010 position 2500 data003
...
corner corner match 56.129477
The model 10 is the same as model 9 but with a greater fmax. Its location accuracy is a slightly higher at around 42% and the position accuracy is lower at around 56%.
ros2 run TBOT01 controller data004_05.bin 250 1000
ros2 run TBOT01 observer model012 location 2500 data003
...
room4 room5 fail 42.396313
ros2 run TBOT01 observer model012 position 2500 data003
...
side centre fail 62.720984
Model 12 has a higher likelihood than models 9 or 10 and a slightly higher accuracy. Its location accuracy is around 42% and the position accuracy is around 63%.
Overall the results are as follows -
| Model | Type | Dataset | Location % | Position % |
|---|---|---|---|---|
| 9 | induced | 3 | 39 | 60 |
| 10 | induced | 3 | 42 | 56 |
| 12 | induced | 3 | 42 | 63 |
| 13 | conditioned | 3 | 59 | 72 |
| 14 | conditioned | 3 | 64 | 80 |
Let us see if we can improve on model 14 with the additional data in data004.
Model 15 has the same configuration as model 11 except its history consists of the union of the data003 and data004 records, and fmax is increased from 127 to 384,
./main induce model015 4 >model015.log
Let us compare its likelihood to that of model 11,
./main entropy_region model015 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 968762
./main entropy_region model011 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 933468
Model 16 is induced from a lower level that consists of the slice variables of 12 model 15 regions every 30 degrees. It has the same parameters as model 14 except its history consists of the union of the data003 and data004 records, and fmax is increased from 1024 to 4096,
./main condition model016 8 location >model016_location.log
./main condition model016 8 position >model016_position.log
Even with an fmax of 4096, neither conditioned model is completely resolved.
When we compare the likelihoods to those of model 14, there is little change,
./main entropy model016_location 10 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 235340
./main entropy model014_location 10 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 239912
./main entropy model016_position 10 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 197310
./main entropy model014_position 10 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 184506
Now, however, the label accuracy has improved considerably,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env002.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data.bin 250 1000
ros2 run TBOT01 observer model016_location location 2500 data004
...
room6 room6 match 85.122898
ros2 run TBOT01 observer model016_position position 2500 data004
...
side side match 88.745149
Now let us induce a model to a similar depth for comparison. Model 17 has the same parameters as model 12, but the underlying model is model 15 and the fmax is increased to 4096,
./main induce model017 8 >model017.log
./main entropy model017 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 108041
The model 17 has 72652 transforms so its size-shuffle sum relative entropy is calculated here without shuffle scaling to minimise the memory required. Compare the other models with the same scaling and history,
./main entropy model009 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 98888.3
./main entropy model010 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 100474
./main entropy model012 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 99696.5
./main entropy model013_location 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 45334.5
./main entropy model014_location 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 97843.5
./main entropy model016_location 1 data004
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 97093.9
Now we find the label accuracy for model 17,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env002.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data.bin 250 1000
ros2 run TBOT01 observer model017 location 2500 data004
...
door56 room5 fail 58.469388
ros2 run TBOT01 observer model017 position 2500 data004
...
side side match 68.536461
We can update our table,
| Model | Type | Underlying | Fmax | Dataset | Likelihood | Location % | Position % |
|---|---|---|---|---|---|---|---|
| 9 | induced | substrate | 127 | 3 | 98,888 | 39 | 60 |
| 10 | induced | substrate | 512 | 3 | 100,474 | 42 | 56 |
| 12 | induced | model 11 | 127 | 3 | 99,696 | 42 | 63 |
| 17 | induced | model 15 | 4096 | 4 | 108,041 | 58 | 69 |
| 13 | conditioned | substrate | 1024 | 3 | 45,334 | 59 | 72 |
| 14 | conditioned | model 11 | 1024 | 3 | 97,843 | 64 | 80 |
| 16 | conditioned | model 15 | 4096 | 4 | 97,093 | 85 | 89 |
We can see that induced model 17 is considerably more accurate than induced model 12, but it is still less accurate than any of the conditioned models. The induced models are all more likely than any of the conditioned models, however. The larger induced models with 2 levels have the greatest likelihoods, but the increase in likelihood is small which suggests that most of the interesting alignments have already been captured.
Model 16 was conditioned on 81261 events and has 28315 transforms. No doubt larger models conditioned on more history would incrementally increase the label accuracy, but for now let us consider increasing the substrate instead with timewise frames.
To do that we must first select which of the past records will comprise the short term memory, i.e. the timewise frames. Let us image the first 60 events in data003,
./main bitmap data003 10 0 59
Each event is scaled vertically by 10 pixels,

In these 12 seconds, the turtlebot starts in the room 4, facing to the right, turns to the left by 30 degrees and then moves towards the corridor to room 1,
| 1 second | 12 seconds |
|---|---|
 |
 |
We can apply a model to the 60 events and average the slice corresponding to each event to see the history as turtlebot 'sees' it. For example, if we apply model 9 with the model history data003,
./main observe_bitmap data003 model009 data003 10 0 59
the turtlebot 'sees' this -

Let us do this for the other models and display them side by side,
./main observe_bitmap data003 model010 data003 10 0 59
./main observe_bitmap data003 model012 data003 10 0 59
./main observe_bitmap data003 model013_location data003 10 0 59
./main observe_bitmap data003 model014_location data003 10 0 59
./main observe_bitmap data003 model016_location data004 10 0 59
./main observe_bitmap data003 model017 data004 10 0 59
First, the induced models,
| data003 | model010 | model012 | model017 |
|---|---|---|---|
|
 |
 |
 |
Then, the conditioned models,
| data003 | model013 | model014 | model016 |
|---|---|---|---|
|
 |
 |
 |
Note that the induced model 12 has only 127 fuds, which explains its blurriness compared to its neighbours. Perhaps the most literal of the images that of incduced model 17. Its counterpart, conditioned model 16 is considerably smoother, which suggests that the detail is not relevant to the location label. Compare it to conditioned model 13, a one level model depending directly on the substrate, which superficially captures a lot of the detail but is less accurate and frequently is mistaken about individual events.
Let us observe the slice variables and the label matches for each event. First induced model 17,
./main observe data003 model017 data004 location 0 59
| event | variable | location | guess | match? |
|---|---|---|---|---|
| 0 | <<<0,1123>,s>,2> | room4 | room1 | fail |
| 1 | <<<0,2053>,s>,2> | room4 | room4 | match |
| 2 | <<<0,3055>,s>,2> | room4 | room4 | match |
| 3 | <<<0,3055>,s>,2> | room4 | room4 | match |
| 4 | <<<0,3055>,s>,2> | room4 | room4 | match |
| 5 | <<<0,2029>,s>,2> | room4 | room4 | match |
| 6 | <<<0,2029>,s>,2> | room4 | room4 | match |
| 7 | <<<0,2029>,s>,2> | room4 | room4 | match |
| 8 | <<<0,1384>,s>,2> | room4 | room4 | match |
| 9 | <<<0,1384>,s>,2> | room4 | room4 | match |
| 10 | <<<0,1384>,s>,2> | room4 | room4 | match |
| 11 | <<<0,2380>,s>,1> | room4 | room1 | fail |
| 12 | <<<0,1807>,s>,2> | room4 | room4 | match |
| 13 | <<<0,1807>,s>,2> | room4 | room4 | match |
| 14 | <<<0,1807>,s>,2> | room4 | room4 | match |
| 15 | <<<0,1807>,s>,2> | room4 | room4 | match |
| 16 | <<<0,1807>,s>,2> | room4 | room4 | match |
| 17 | <<<0,2463>,s>,1> | room4 | room4 | match |
| 18 | <<<0,2463>,s>,1> | room4 | room4 | match |
| 19 | <<<0,2463>,s>,2> | room4 | room4 | match |
| 20 | <<<0,2463>,s>,3> | room4 | room4 | match |
| 21 | <<<0,3023>,s>,1> | room4 | room4 | match |
| 22 | <<<0,2478>,s>,2> | room4 | room4 | match |
| 23 | <<<0,2478>,s>,2> | room4 | room4 | match |
| 24 | <<<0,2478>,s>,2> | room4 | room4 | match |
| 25 | <<<0,162>,s>,1> | room4 | room1 | fail |
| 26 | <<<0,2995>,s>,1> | room4 | room4 | match |
| 27 | <<<0,2995>,s>,1> | room4 | room4 | match |
| 28 | <<<0,2611>,s>,2> | room4 | room4 | match |
| 29 | <<<0,3318>,s>,1> | room4 | room4 | match |
| 30 | <<<0,2320>,s>,2> | room4 | room4 | match |
| 31 | <<<0,2320>,s>,2> | room4 | room4 | match |
| 32 | <<<0,3067>,s>,2> | room4 | door13 | fail |
| 33 | <<<0,3508>,s>,1> | room4 | room4 | match |
| 34 | <<<0,3508>,s>,1> | room4 | room4 | match |
| 35 | <<<0,3508>,s>,2> | room4 | room4 | match |
| 36 | <<<0,1278>,s>,2> | room4 | room4 | match |
| 37 | <<<0,4077>,s>,1> | room4 | room4 | match |
| 38 | <<<0,4077>,s>,1> | room4 | room4 | match |
| 39 | <<<0,1465>,s>,2> | room4 | room4 | match |
| 40 | <<<0,844>,s>,2> | room4 | room4 | match |
| 41 | <<<0,844>,s>,2> | room4 | room4 | match |
| 42 | <<<0,1517>,s>,2> | room4 | room4 | match |
| 43 | <<<0,3702>,s>,2> | room4 | room4 | match |
| 44 | <<<0,3702>,s>,1> | room4 | room1 | fail |
| 45 | <<<0,3702>,s>,1> | room4 | room1 | fail |
| 46 | <<<0,1835>,s>,1> | room4 | room4 | match |
| 47 | <<<0,428>,s>,2> | room4 | room2 | fail |
| 48 | <<<0,2492>,s>,2> | room4 | room4 | match |
| 49 | <<<0,2737>,s>,1> | room4 | room5 | fail |
| 50 | <<<0,2052>,s>,1> | room4 | room4 | match |
| 51 | <<<0,3592>,s>,1> | room4 | room4 | match |
| 52 | <<<0,3592>,s>,1> | room4 | room4 | match |
| 53 | <<<0,3592>,s>,1> | room4 | room4 | match |
| 54 | <<<0,2837>,s>,1> | room4 | room4 | match |
| 55 | <<<0,2641>,s>,1> | room4 | room4 | match |
| 56 | <<<0,4086>,s>,1> | room4 | room4 | match |
| 57 | <<<0,3325>,s>,2> | room4 | room4 | match |
| 58 | <<<0,2488>,s>,3> | room4 | room4 | match |
| 59 | <<<0,2488>,s>,3> | room4 | room4 | match |
Of these 60 events there are 38 unique consecutive slices, which suggests a frame every 2 events or 0.5 seconds.
Now conditioned model 16,
./main observe data003 model016_location data004 location 0 59
| event | variable | location | guess | match? |
|---|---|---|---|---|
| 0 | <<<1,445>,s>,2> | room4 | room4 | match |
| 1 | <<<1,3146>,s>,1> | room4 | room4 | match |
| 2 | <<<1,2853>,s>,2> | room4 | room4 | match |
| 3 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 4 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 5 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 6 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 7 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 8 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 9 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 10 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 11 | <<<1,3948>,s>,1> | room4 | room4 | match |
| 12 | <<<1,2105>,s>,2> | room4 | room4 | match |
| 13 | <<<1,2850>,s>,2> | room4 | room4 | match |
| 14 | <<<1,3532>,s>,1> | room4 | room4 | match |
| 15 | <<<1,3532>,s>,1> | room4 | room4 | match |
| 16 | <<<1,3532>,s>,1> | room4 | room4 | match |
| 17 | <<<1,3689>,s>,1> | room4 | room4 | match |
| 18 | <<<1,3689>,s>,1> | room4 | room4 | match |
| 19 | <<<1,1624>,s>,2> | room4 | room4 | match |
| 20 | <<<1,1624>,s>,2> | room4 | room4 | match |
| 21 | <<<1,3111>,s>,2> | room4 | room4 | match |
| 22 | <<<1,3373>,s>,1> | room4 | room4 | match |
| 23 | <<<1,3373>,s>,1> | room4 | room4 | match |
| 24 | <<<1,3373>,s>,1> | room4 | room4 | match |
| 25 | <<<1,3373>,s>,1> | room4 | room4 | match |
| 26 | <<<1,2629>,s>,2> | room4 | room4 | match |
| 27 | <<<1,3373>,s>,1> | room4 | room4 | match |
| 28 | <<<1,3146>,s>,1> | room4 | room4 | match |
| 29 | <<<1,2876>,s>,2> | room4 | room4 | match |
| 30 | <<<1,790>,s>,2> | room4 | room4 | match |
| 31 | <<<1,790>,s>,2> | room4 | room4 | match |
| 32 | <<<1,790>,s>,2> | room4 | room4 | match |
| 33 | <<<1,790>,s>,2> | room4 | room4 | match |
| 34 | <<<1,790>,s>,2> | room4 | room4 | match |
| 35 | <<<1,914>,s>,2> | room4 | room4 | match |
| 36 | <<<1,3146>,s>,1> | room4 | room4 | match |
| 37 | <<<1,2853>,s>,2> | room4 | room4 | match |
| 38 | <<<1,2853>,s>,2> | room4 | room4 | match |
| 39 | <<<1,2853>,s>,2> | room4 | room4 | match |
| 40 | <<<1,2853>,s>,2> | room4 | room4 | match |
| 41 | <<<1,2853>,s>,2> | room4 | room4 | match |
| 42 | <<<1,3146>,s>,1> | room4 | room4 | match |
| 43 | <<<1,2940>,s>,2> | room4 | room4 | match |
| 44 | <<<1,790>,s>,2> | room4 | room4 | match |
| 45 | <<<1,2492>,s>,1> | room4 | room4 | match |
| 46 | <<<1,2492>,s>,1> | room4 | room4 | match |
| 47 | <<<1,2492>,s>,1> | room4 | room4 | match |
| 48 | <<<1,2492>,s>,1> | room4 | room4 | match |
| 49 | <<<1,4037>,s>,1> | room4 | room4 | match |
| 50 | <<<1,4037>,s>,1> | room4 | room4 | match |
| 51 | <<<1,4037>,s>,1> | room4 | room4 | match |
| 52 | <<<1,4037>,s>,1> | room4 | room4 | match |
| 53 | <<<1,4037>,s>,1> | room4 | room4 | match |
| 54 | <<<1,4037>,s>,1> | room4 | room4 | match |
| 55 | <<<1,2994>,s>,2> | room4 | room4 | match |
| 56 | <<<1,3923>,s>,1> | room4 | room4 | match |
| 57 | <<<1,1085>,s>,2> | room4 | room4 | match |
| 58 | <<<1,1085>,s>,2> | room4 | room4 | match |
| 59 | <<<1,1085>,s>,2> | room4 | room4 | match |
Of these 60 events there are 27 unique consecutive slices, which also suggests a frame every 0.5 seconds. Let us check that this rate applies in general,
./main observe data003 model017 data004 location
...
z: 13381
slice_unique.size(): 3595
consecutive_unique_count: 7765
match_count: 10256
100.0*match_count/z: 76.646
./main observe data004_04 model017 data004 location
...
z: 14546
slice_unique.size(): 3635
consecutive_unique_count: 8581
match_count: 11031
100.0*match_count/z: 75.8353
./main observe data003 model016_location data004 location
...
z: 13381
slice_unique.size(): 2216
consecutive_unique_count: 5489
match_count: 12962
100.0*match_count/z: 96.8687
./main observe data004_04 model016_location data004 location
...
z: 14546
slice_unique.size(): 2290
consecutive_unique_count: 6199
match_count: 14015
100.0*match_count/z: 96.3495
./main observe data003 model017 data004 position
...
z: 13381
slice_unique.size(): 3595
consecutive_unique_count: 7765
match_count: 11409
00.0*match_count/z: 85.2627
./main observe data003 model016_position data004 position
...
z: 13381
slice_unique.size(): 1973
consecutive_unique_count: 6236
match_count: 13158
100.0*match_count/z: 98.3335
Note that the number of matches here is higher than for the table above. This is because the models were induced or conditioned on data004 which includes the data003 records.
The addition of timewise frames requires scaling the models, so before we do that let us consider the underlying level models models 11 and 15. We saw above that the likelihoods are not much different, but model 11 has only 2487 transforms while model 15 has 6685. The derived induced models 12 and 17 have 5600 and 72652 transforms respectively. Of course, this may be purely due to fmax increasing from 127 to 4096, but let us check this in a new induced model 18 that has model 11 for its underlying, but is otherwise the same as model 17.
./main induce model018 8 >model018.log
./main entropy model018 1 data004
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 110278
./main condition model019 8 location >model019_location.log
./main entropy model019_location 1 data004
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 106063
Let us also also observe the accuracy using a common test dataset data005 that has not been used for modelling,
./main observe data005 model018 data004 location
...
100.0*match_count/z: 56.7202
./main observe data005 model018 data004 position
...
100.0*match_count/z: 71.6021
./main observe data005 model017 data004 location
...
100.0*match_count/z: 59.5346
./main observe data005 model017 data004 position
...
100.0*match_count/z: 71.7463
./main observe data005 model019_location data004 location
...
100.0*match_count/z: 84.7405
./main observe data005 model019_position data004 position
...
100.0*match_count/z: 89.3259
./main observe data005 model016_location data004 location
...
100.0*match_count/z: 86.285
./main observe data005 model016_position data004 position
...
100.0*match_count/z: 89.8339
./main bitmap data005 10 0 59
./main observe_bitmap data005 model018 data004 10 0 59
./main observe_bitmap data005 model017 data004 10 0 59
./main observe_bitmap data005 model019_location data004 10 0 59
./main observe_bitmap data005 model016_location data004 10 0 59
| Model | Type | Underlying | Fmax | Dataset | Likelihood | Location % | Position % |
|---|---|---|---|---|---|---|---|
| 18 | induced | model 11 | 4096 | 4 | 110,278 | 57 | 72 |
| 17 | induced | model 15 | 4096 | 4 | 108,041 | 60 | 72 |
| 19 | conditioned | model 11 | 4096 | 4 | 106,063 | 85 | 89 |
| 16 | conditioned | model 15 | 4096 | 4 | 97,093 | 86 | 90 |
First, the induced models,
| data005 | model018 | model017 |
|---|---|---|
 |
 |
 |
Then, the conditioned models,
| data005 | model019 | model016 |
|---|---|---|
|
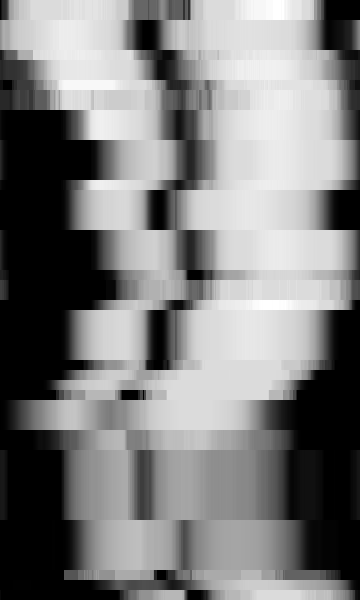 |
 |
So the smaller underlying model has little effect on the accuracy and actually increases the likelihood.
Now let us consider timewise sequences of frames to see if the added substrate improves either likelihood or label accuracy. Model 20 is a copy of conditioned model 19 except that the substrate includes sequence_count frames of the immediately previous events every sequence_interval events. Let us first check that a single frame has the same results as for model 19,
./main condition model020 8 location 1 1 >model020_location_1_1.log
./main entropy_sequence model020_location_1_1 1 data004 1 1
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 106063
./main observe_sequence data005 model020_location_1_1 data004 location 1 1
...
100.0*match_count/z: 84.7405
./main entropy model019_location 1 data004
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 106063
./main observe data005 model019_location data004 location
...
100.0*match_count/z: 84.7405
This is indeed the case. Now let us present the results for model 20 for various sequence parameters. In addition, induced model 21 will be the timewise version of induced model 18. Also we shall compare these to two level models, conditioned model 22 and induced model 23, where the underlying model is model 18 rather than 12 spacewise instances of model 11. All will have a sequence_interval of 4 events or 1 second,
| Model | Type | Underlying | Fmax | Dataset | Sequence length | Likelihood | Location % | Position % |
|---|---|---|---|---|---|---|---|---|
| 18 | induced | model 11 | 4096 | 4 | 1 | 110,278 | 57 | 72 |
| 21 | induced | model 11 | 4096 | 4 | 2 | 110,310 | 52 | - |
| 21 | induced | model 11 | 4096 | 4 | 3 | 109,378 | 50 | - |
| 23 | induced | model 18 | 4096 | 4 | 2 | 109,218 | 53 | - |
| 19 | conditioned | model 11 | 4096 | 4 | 1 | 106,063 | 85 | 89 |
| 20 | conditioned | model 11 | 4096 | 4 | 2 | 105,960 | 83 | - |
| 20 | conditioned | model 11 | 4096 | 4 | 3 | 103,220 | 82 | - |
| 20 | conditioned | model 11 | 4096 | 4 | 7 | 103,874 | 80 | - |
| 22 | conditioned | model 18 | 4096 | 4 | 2 | 107,855 | 64 | - |
We can see that the addition of the values as they were in the events a few seconds ago makes little difference to the likelihood and in all cases reduces the location accuracy. Clearly the alignments within the frames are much greater than those between the frames, suggesting that for the data004 history size, at least, the static information is more important than the dynamic. Also the dynamic information perhaps causes some over-fitting in the conditioned models leading to lower likelihoods and label accuracies.
Before we move on to consider models that control the motor variable, let us increase the random region substrate with timewise frames as the underlying in a two level model. Model 24 is a timewise version of model 15, with frames every half second for three seconds,
./main induce model024 8 7 2 >model024.log
We can view the first 60 events,
./main bitmap_reqion_sequence 7 2 10 0 59
The sequence of 7 frames has the earliest frame on the left and the latest on the right,

We can compare the regional likelihoods (all with a scaling factor of 1 to make them comparable),
./main entropy_region model011 1 data004 1
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 93433.5
./main entropy_region model015 1 data004 1
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 97069.6
./main entropy_region_sequence model024 1 7 2
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 101416
| Model | Type | Fmax | Dataset | Sequence length | Likelihood |
|---|---|---|---|---|---|
| 11 | induced | 127 | 4 | 1 | 93,433 |
| 15 | induced | 384 | 4 | 1 | 97,069 |
| 24 | induced | 384 | 4 | 7 | 101,416 |
We can see that the timewise regional model is only a little more likely.
Finally let us generate conditioned model 25 with 12 spacewise frames of underlying model 24,
./main condition model025 8 location 7 2 >model025_location_7_2.log
./main entropy_sequence model025_location_7_2 1 data004 7 2
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 103393
./main observe_sequence data005 model025_location_7_2 data004 location 7 2
...
100.0*match_count/z: 73.8733
| Model | Type | Underlying | Fmax | Dataset | Sequence length | Sequence step | Likelihood | Location % | Position % |
|---|---|---|---|---|---|---|---|---|---|
| 18 | induced | model 11 | 4096 | 4 | 1 | 4 | 110,278 | 57 | 72 |
| 21 | induced | model 11 | 4096 | 4 | 2 | 4 | 110,310 | 52 | - |
| 21 | induced | model 11 | 4096 | 4 | 3 | 4 | 109,378 | 50 | - |
| 23 | induced | model 18 | 4096 | 4 | 2 | 4 | 109,218 | 53 | - |
| 19 | conditioned | model 11 | 4096 | 4 | 1 | 4 | 106,063 | 85 | 89 |
| 20 | conditioned | model 11 | 4096 | 4 | 2 | 4 | 105,960 | 83 | - |
| 20 | conditioned | model 11 | 4096 | 4 | 3 | 4 | 103,220 | 82 | - |
| 20 | conditioned | model 11 | 4096 | 4 | 7 | 4 | 103,874 | 80 | - |
| 22 | conditioned | model 18 | 4096 | 4 | 2 | 4 | 107,855 | 64 | - |
| 25 | conditioned | model 24 | 4096 | 4 | 7 | 2 | 103,393 | 74 | - |
Model 25 is a three level model with the top level conditioned on a spacewise substrate of two level model 24 induced on a timewise substrate of one level model 11 induced on a random region substrate. Compare it to model 22 which is a three level model with the top level conditioned on a timewise substrate of two level model 18 induced on a spacewise substrate of one level model 11 induced on a random region substrate. Model 25 has a lower likelihood but a higher accuracy than model 22. So model 25 is intermediate between model 22 and model 20, which is the two level conditioned on a spacetimewise substrate of one level model 11 induced on a random region substrate. This confirms that the static information is more important than the dynamic. We will ignore timewise models for the remainder of this discussion.
Now that TurtleBot is able to make guesses about its location, let us consider what actions TurtleBot should take in order to navigate autonomously around the TurtleBot house.
In order to see the consequences of past actions, we must look at the sequence of events. In this way we can determine future labels for each event, for example, location_next and room_next. It was found, however, that the existing collision avoidance algorithm was not enough to prevent occasional crashes in the previous datasets, making it difficult to obtain long sequences. The crashes were due to collisions with the open shelves and bookcases. The solution was to simply turn the shelves and bookcases around so that they were closed and thus detectable by the turtlebot's lidar. The new environment is env009.
In addition, we have added a random turn interval to the controller. If the turtlebot is going straight it will randomly turn left or right on a timescale on the order of the turn interval.
We ran the simulation with the new environment,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
and ran the new controller with a random turn interval of 5000 ms,
ros2 run TBOT01 controller data008.bin 250 5000 5000
Note that the bias interval has been increased to 5000 ms to reduce dither in the corners.
The turtlebot ran for 5.5 hours to create a test dataset data008,
./main analyse data008
hr->dimension: 363
hr->size: 78612
({(<scan,1>,0)},283 % 1)
({(<scan,1>,1)},15049 % 1)
({(<scan,1>,2)},12504 % 1)
({(<scan,1>,3)},9952 % 1)
({(<scan,1>,4)},7933 % 1)
({(<scan,1>,5)},6710 % 1)
({(<scan,1>,6)},5842 % 1)
({(<scan,1>,7)},20339 % 1)
({(<scan,180>,0)},398 % 1)
({(<scan,180>,1)},8726 % 1)
({(<scan,180>,2)},11379 % 1)
({(<scan,180>,3)},10790 % 1)
({(<scan,180>,4)},8291 % 1)
({(<scan,180>,5)},7373 % 1)
({(<scan,180>,6)},6584 % 1)
({(<scan,180>,7)},25071 % 1)
({(motor,0)},8255 % 1)
({(motor,1)},62301 % 1)
({(motor,2)},8056 % 1)
({(location,door12)},580 % 1)
({(location,door13)},524 % 1)
({(location,door14)},1023 % 1)
({(location,door45)},899 % 1)
({(location,door56)},1805 % 1)
({(location,room1)},14793 % 1)
({(location,room2)},4446 % 1)
({(location,room3)},3478 % 1)
({(location,room4)},26175 % 1)
({(location,room5)},10508 % 1)
({(location,room6)},14381 % 1)
({(position,centre)},19756 % 1)
({(position,corner)},16408 % 1)
({(position,side)},42448 % 1)
The turtlebot spent 65% of its time in rooms 4, 5 and 6.
Compare to data003,
./main analyse data003
hr->dimension: 363
hr->size: 13381
...
({(motor,0)},1140 % 1)
({(motor,1)},11096 % 1)
({(motor,2)},1145 % 1)
({(location,door12)},178 % 1)
({(location,door13)},120 % 1)
({(location,door14)},196 % 1)
({(location,door45)},86 % 1)
({(location,door56)},191 % 1)
({(location,room1)},3852 % 1)
({(location,room2)},1307 % 1)
({(location,room3)},925 % 1)
({(location,room4)},3796 % 1)
({(location,room5)},977 % 1)
({(location,room6)},1753 % 1)
({(position,centre)},3478 % 1)
({(position,corner)},3028 % 1)
({(position,side)},6875 % 1)
In data008 3% more time is spent in a turn but 2% less time is spent in a corner.
We ran the turtlebot again to create a training dataset, data009, this time for 12 hours -
ros2 run TBOT01 controller data009.bin 250 5000 5000
Now the turtlebot spends 48% of its time in rooms 4, 5 and 6 -
./main analyse data009
hr->dimension: 363
hr->size: 172301
({(<scan,1>,0)},692 % 1)
({(<scan,1>,1)},33376 % 1)
({(<scan,1>,2)},27585 % 1)
({(<scan,1>,3)},22370 % 1)
({(<scan,1>,4)},17382 % 1)
({(<scan,1>,5)},14909 % 1)
({(<scan,1>,6)},12968 % 1)
({(<scan,1>,7)},43019 % 1)
({(<scan,180>,0)},890 % 1)
({(<scan,180>,1)},19205 % 1)
({(<scan,180>,2)},25416 % 1)
({(<scan,180>,3)},23958 % 1)
({(<scan,180>,4)},18528 % 1)
({(<scan,180>,5)},16419 % 1)
({(<scan,180>,6)},14367 % 1)
({(<scan,180>,7)},53518 % 1)
({(motor,0)},17809 % 1)
({(motor,1)},136432 % 1)
({(motor,2)},18060 % 1)
({(location,door12)},2067 % 1)
({(location,door13)},2365 % 1)
({(location,door14)},2012 % 1)
({(location,door45)},1288 % 1)
({(location,door56)},2314 % 1)
({(location,room1)},42708 % 1)
({(location,room2)},19975 % 1)
({(location,room3)},17110 % 1)
({(location,room4)},45058 % 1)
({(location,room5)},16658 % 1)
({(location,room6)},20746 % 1)
({(position,centre)},41677 % 1)
({(position,corner)},38736 % 1)
({(position,side)},91888 % 1)
We then induced random regional model 26,
./main induce model026 8 >model026.log
./main entropy_region model011 1 data009
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 1.97725e+06
./main entropy_region model026 1 data009
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 1.96486e+06
Its likelihood is very similar to that of model 11.
Then we induced model 27 and compared it to model 18,
./main induce model027 32 >model027.log
./main entropy model018 1 data009
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 229325
./main entropy model027 1 data009
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 231911
./main observe data008 model018 data009 location
100.0*match_count/z: 59.3599
./main observe data008 model027 data009 location
100.0*match_count/z: 63.9114
Both the likelihood and the location accuracy were a little higher in model 27 using the new dataset.
Then we conditioned model 28 on location and compared it to model 19,
./main condition model028 8 location >model028_location.log
./main entropy model019_location 1 data009
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 220714
./main entropy model028_location 1 data009
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 215919
./main observe data008 model019_location data009 location
100.0*match_count/z: 75.893
./main observe data008 model028_location data009 location
100.0*match_count/z: 86.698
Model 28 has lower likelihood but higher label accuracy than model 19 in test dataset 8.
Now let us create new substrate variables location_next and position_next. These are variables that look forward from the current event until a location or position transition. A history in the new substrate 3 is obtained with the recordListsHistoryRepa_3 function in dev.h,
./main analyse data008 substrate003
...
({(location_next,door12)},7951 % 1)
({(location_next,door13)},8184 % 1)
({(location_next,door14)},16717 % 1)
({(location_next,door45)},10830 % 1)
({(location_next,door56)},18869 % 1)
({(location_next,room1)},1073 % 1)
({(location_next,room2)},298 % 1)
({(location_next,room3)},258 % 1)
({(location_next,room4)},3528 % 1)
({(location_next,room5)},9808 % 1)
({(location_next,room6)},998 % 1)
({(location_next,unknown)},98 % 1)
({(position_next,centre)},22150 % 1)
({(position_next,corner)},20604 % 1)
({(position_next,side)},35845 % 1)
({(position_next,unknown)},13 % 1)
Now let us condition model 29 on location_next rather than location,
./main condition model029 8 location_next >model029_location_next.log
...
fud: 4096
fud slice size: 39
sized entropy label : 58.8561
...
./main entropy model029_location_next 1 data009 substrate003
...
fudRepasSize(*dr->fud): 18712
frder(*dr->fud)->size(): 4097
frund(*dr->fud)->size(): 360
treesSize(*dr->slices): 8192
treesLeafElements(*dr->slices)->size(): 4097
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 213890
./main observe data008 model029_location_next data009 location 0 0 substrate003
...
100.0*match_count/z: 82.0422
./main observe data008 model029_location_next data009 location_next 0 0 substrate003
...
100.0*match_count/z: 54.0732
The likelihood of 213,890 is a little less than model 28. The label accuracy is a lot lower at 54% instead of 87%, but of course the label is considerably more ambiguous being the next location rather than the current location.
Now let us add motor to the substrate accessible to the conditioner, to see if it can disambiguate the next label.
./main condition model030 8 location_next >model030_location_next.log
...
fud: 4096
fud slice size: 61
sized entropy label : 57.0735
...
./main entropy model030_location_next 1 data009 substrate003
...
fudRepasSize(*dr->fud): 18813
frder(*dr->fud)->size(): 4240
frund(*dr->fud)->size(): 361
treesSize(*dr->slices): 8335
treesLeafElements(*dr->slices)->size(): 4240
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 213915
./main observe data008 model030_location_next data009 location 0 0 substrate003
...
100.0*match_count/z: 81.7852
./main observe data008 model030_location_next data009 location_next 0 0 substrate003
...
100.0*match_count/z: 53.9421
We can see that the likelihood and label accuracy are very similar to model 29. However the underlying has 361 variables which means that it includes motor. When we examine the log we can see that motor is the entropy variable in 143 of the 4096 fuds and that the trailing sized slice entropy is 57.0735 rather than 58.8561 without motor (compare to 18.1327 for location conditioned model 28). That is, motor is having some effect in conditioning the model even if it does not show itself in the accuracy.
In order to increase the effect let us use an fmax of 16,384 in model 31,
./main condition model031 16 location_next >model031_location_next.log
./main entropy model031_location_next 1 data009 substrate003
...
fudRepasSize(*dr->fud): 49897
frder(*dr->fud)->size(): 16909
frund(*dr->fud)->size(): 361
treesSize(*dr->slices): 33292
treesLeafElements(*dr->slices)->size(): 16909
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 218519
./main observe data008 model031_location_next data009 location_next 0 0 substrate003
...
100.0*match_count/z: 56.0576
Now there is a small increase in both the likelihood, at 218,519, and the next label accuracy, at 56%. In total, 524 of the 16,384 fuds depend on motor,
| Model | Type | Underlying | Fmax | Dataset | Substrate | Likelihood | Location % | Next Location % |
|---|---|---|---|---|---|---|---|---|
| 18 | induced | model 11 | 4096 | 4 | 2 | 229,325 | 59 | |
| 27 | induced | model 26 | 4096 | 9 | 2 | 231,911 | 64 | |
| 19 | conditioned | model 11 | 4096 | 4 | 2 | 220,714 | 76 | |
| 28 | conditioned | model 26 | 4096 | 9 | 2 | 215,919 | 87 | |
| 29 | conditioned | model 26 | 4096 | 9 | 3 | 213,890 | 82 | 54 |
| 30 | conditioned | model 26 | 4096 | 9 | 3 | 213,915 | 82 | 54 |
| 31 | conditioned | model 26 | 16384 | 9 | 3 | 218,519 | 86 | 56 |
The motor value has at least a weak functional relation to the next location, so let us see what effect there is if we restrict the location values to rooms only. Here is substrate004 which adds room_next,
/main analyse data008 substrate004
...
({(room_next,door12)},0 % 1)
({(room_next,door13)},0 % 1)
({(room_next,door14)},0 % 1)
({(room_next,door45)},0 % 1)
({(room_next,door56)},0 % 1)
({(room_next,room1)},19135 % 1)
({(room_next,room2)},2013 % 1)
({(room_next,room3)},5331 % 1)
({(room_next,room4)},14994 % 1)
({(room_next,room5)},31626 % 1)
({(room_next,room6)},5415 % 1)
({(room_next,unknown)},98 % 1)
Now we run models 32, 33 and 34 which parallel models 29, 30 and 31 but are conditioned on room_next rather than location_next,
./main condition model032 16 room_next >model032_room_next.log
...
fud: 4096
fud slice size: 78
sized entropy label : 48.3379
...
./main entropy model032_room_next 1 data009 substrate004
...
fudRepasSize(*dr->fud): 19603
frder(*dr->fud)->size(): 4097
frund(*dr->fud)->size(): 360
treesSize(*dr->slices): 8192
treesLeafElements(*dr->slices)->size(): 4097
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 212715
./main observe data008 model032_room_next data009 location 0 0 substrate004
...
100.0*match_count/z: 80.9647
./main observe data008 model032_room_next data009 location_next 0 0 substrate004
...
100.0*match_count/z: 51.454
./main observe data008 model032_room_next data009 room_next 0 0 substrate004
...
100.0*match_count/z: 63.3211
./main condition model033 16 room_next >model033_room_next.log
...
fud: 4096
fud slice size: 340
sized entropy label : 46.8731
...
./main entropy model033_room_next 1 data009 substrate004
...
fudRepasSize(*dr->fud): 19309
frder(*dr->fud)->size(): 4216
frund(*dr->fud)->size(): 361
treesSize(*dr->slices): 8311
treesLeafElements(*dr->slices)->size(): 4216
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 212496
./main observe data008 model033_room_next data009 location 0 0 substrate004
...
100.0*match_count/z: 80.9533
./main observe data008 model033_room_next data009 location_next 0 0 substrate004
...
100.0*match_count/z: 51.5354
./main observe data008 model033_room_next data009 room_next 0 0 substrate004
...
100.0*match_count/z: 63.1672
./main condition model034 16 room_next >model034_room_next.log
./main entropy model034_room_next 1 data009 substrate004
...
fudRepasSize(*dr->fud): 50137
frder(*dr->fud)->size(): 16878
frund(*dr->fud)->size(): 361
treesSize(*dr->slices): 33261
treesLeafElements(*dr->slices)->size(): 16878
...
ent(*add(*aa,*bb)) * (z+v) - ent(*aa) * z - ent(*bb) * v: 215763
./main observe data008 model034_room_next data009 location 0 0 substrate004
...
100.0*match_count/z: 83.9261
./main observe data008 model034_room_next data009 location_next 0 0 substrate004
...
100.0*match_count/z: 52.6523
./main observe data008 model034_room_next data009 room_next 0 0 substrate004
...
100.0*match_count/z: 64.1289
We can see that the likelihood and label accuracy of model 33 are very similar to model 32, but we can see that motor is the entropy variable in 119 of the 4096 fuds and that the trailing sized slice entropy is 46.8731 rather than 48.3379.
In model 34 there is an increase in both the likelihood and the next label accuracy. In total, 493 of the 16,384 fuds depend on motor,
| Model | Type | Underlying | Fmax | Dataset | Substrate | Likelihood | Location % | Next Location % | Next Room % |
|---|---|---|---|---|---|---|---|---|---|
| 18 | induced | model 11 | 4096 | 4 | 2 | 229,325 | 59 | ||
| 27 | induced | model 26 | 4096 | 9 | 2 | 231,911 | 64 | ||
| 19 | conditioned | model 11 | 4096 | 4 | 2 | 220,714 | 76 | ||
| 28 | conditioned | model 26 | 4096 | 9 | 2 | 215,919 | 87 | ||
| 29 | conditioned | model 26 | 4096 | 9 | 3 | 213,890 | 82 | 54 | |
| 30 | conditioned | model 26 | 4096 | 9 | 3 | 213,915 | 82 | 54 | |
| 31 | conditioned | model 26 | 16384 | 9 | 3 | 218,519 | 86 | 56 | |
| 32 | conditioned | model 26 | 4096 | 9 | 4 | 212,715 | 81 | 51 | 63 |
| 33 | conditioned | model 26 | 4096 | 9 | 4 | 212,496 | 81 | 52 | 63 |
| 34 | conditioned | model 26 | 16384 | 9 | 4 | 215,763 | 84 | 53 | 64 |
Given that the motor value has at least a weak functional relation to the location_next and room_next, we modified the controller to accept turn requests made by an observer or by a user. These requests are only accepted when the turtlebot is moving straight ahead. If the turtlebot is avoiding an obstacle the turn request merely sets the bias. Let us now consider how to issue these turn requests.
The TBOT01 actor node is similar to the observer node. It is given a model, a goal room and a mode of deciding actions. At each potential action it applies the model to the current event to determine its slice. The slice of the given history, e.g. data009, is reduced to a histogram of the label variables location, motor and room_next.
In the simplest mode, mode001, this label histogram is multiplied by a unit histogram that defines the desired room_next given the goal room and the slice's location. For example, if the goal is room 6 and the location is room 1 then the room_next is room 4, rather than rooms 2 or 3. The turtlebot guesses location and then repeats the motor actions that tended in the past to lead to the desired goal. That is, the requested action is chosen at random according to the probability histogram implied by the normalised reduction to motor.
In order to test whether TBOT01 actor is navigating around the turtlebot house better than chance, its goal will be set from a fixed sequence of randomly selected rooms. As soon as turtlebot has reached the current goal room, the next goal is set from the next room in the infinite sequence. We will let the turtlebot run until we obtain a degree of statistical significance for the average journey time as measured by the standard score. First we obtain the distribution for the random-turn turtlebot by calculating the journey times in data009,
./main room_expected data009 room5
...
dataset: data009
z: 172301
n: 55
counts: [141,10209,4340,1196,8987,1176,5103,712,2532,1887,379,1218,204,69,2584,1079,2296,15562,6697,443,1376,3717,7213,66,2610,852,675,984,1013,3090,2015,73,1242,3410,4143,3905,3806,2174,2906,496,8126,3280,4505,163,10837,3848,3272,1527,11867,619,115,218,7594,3393,180]
mean: 3129.53
sqrt(variance): 3368.92
sqrt(variance/n): 454.265
The turtlebot was started in room 4 with a first goal of room 5. It travels to 55 rooms during the 12 hours of wandering around with random turns every 5 seconds or so. The average journey time is 3129.53 events at 4 fps, around 13 minutes. The standard error is 454.265 events or around 2 minutes.
To set the turtlebot's goal rooms in the same sequence we use the TBOT01 commander node. This publishes the goals to which the actor node subscribes. The first test is with the actor in mode001 using conditioned model 28,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data012.bin 250 5000
ros2 run TBOT01 actor model028_location room5 1000 data009 0 mode001
ros2 run TBOT01 commander room5 250
This shows the statistics of the journeys taken -
./main room_expected data009 room5 17 data012
...
dataset2: data012
z: 196722
n: 75
counts: [83,1838,1237,4332,1570,1041,1050,1294,16844,497,224,5599,7208,441,128,67,2955,2757,2083,222,1207,924,3175,1174,6362,4783,1288,2476,729,8118,2487,51,5613,2952,427,2292,771,1506,4346,458,11283,1096,5298,187,2115,1386,1067,2993,797,587,2700,109,1009,3067,3097,198,4091,172,91,6245,1773,982,1629,1547,4494,3399,863,1970,433,1059,12756,3682,459,1087,1413]
mean: 2503.24
sqrt(variance): 2960.09
sqrt(variance/n): 341.802
sqrt(err1*err1 + err2*err2): 568.494
(mean2-mean1)/sqrt(err1*err1 + err2*err2): -1.10166
After a run of 13 hours, the standard score is not yet significant, but it is better than one standard deviation. The average journey time of the mode 1 turtlebot is now around ten and a half minutes, though with a standard error of over one and a half minutes.
It is probable that the mode 1 turtlebot shows some improvement over chance. It works because it selects the behaviour of the random-turn turtlebot which led in the past to the correct next room given the goal. Observing the behaviour of the mode 1 turtlebot it appears that it works reasonably well when it is near the desired exit from the room. In these cases there is enough history so that the correct action, left, right or straight ahead, is considerably more probable than the incorrect actions. When the turtlebot is far from the correct exit, however, the probabilities are not much different from chance and then the mode 1 turtlebot behaves no better than the random-turn turtlebot. In mode 2 we try to address this issue.
Another issue concerns rooms with only one exit, i.e. rooms 2, 3 and 6. In these cases all actions lead to the correct next room, so the turtlebot always behaves like the random-turn turtlebot. The random turns slightly increase the time spent in the room compared to the simple collision avoidance turtlebot, so lengthening journey times. This can be seen in the analysis of data009 and data003 above.
In mode 2 the turtlebot subtracts the correct room_next label histogram from the slice's label histogram to obtain the remaining incorrect histogram of the motor action, i.e. actions that led to the wrong rooms given the goal. It then adds the count of right turns of the incorrect histogram to the count of left turns of the correct histogram and vice-versa. The mode 2 turtlebot is thus attracted to the correct exit and repelled from incorrect exits. In addition, in mode 2 the turtlebot disables the turns when it thinks it is in the single exit rooms, 2, 3 and 6. When we re-run we see an improvement,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data019.bin 250 5000
ros2 run TBOT01 actor model028_location room5 1000 data009 0 mode002
ros2 run TBOT01 commander room5 250
./main room_expected data009 room5 17 data019
...
dataset2: data019
z: 120305
n: 60
counts: [480,1690,4563,1666,930,13587,1299,2698,2560,877,1336,2090,3075,65,238,1109,924,4204,1320,246,2548,7330,4225,159,1261,1294,72,346,1968,1392,3849,79,2489,1900,41,1329,1154,1278,5447,171,5406,416,840,594,244,2102,3658,513,8933,173,1760,160,345,333,174,5623,2357,227,110,2627]
mean: 1998.07
sqrt(variance): 2409.78
sqrt(variance/n): 311.101
sqrt(err1*err1 + err2*err2): 550.582
(mean2-mean1)/sqrt(err1*err1 + err2*err2): -2.05503
Now the mean journey time is significantly different. The average journey time has decreased from 13 minutes to 8 minutes and 20 seconds plus or minus 1 minute and 17 seconds.
Further progress with this mode could perhaps be made by recursing on the history. The dataset of a mode 2 turtlebot's run would become the dataset given, along with the model, to a re-run of the mode 2 turtlebot. That is, the attraction/repulsion mode 2 behaviour would replace the random-turn turtlebot's behaviour, so increasing the differences in the counts between correct and incorrect actions. This could be repeated several times to increase the differences in probabilities. (Note that this is not reinforcement learning, because no modelling is done between runs.)
An alternative approach is to consider a discrete choice function of the differences between correct and incorrect actions, rather than a probabilistic choice function. That is, if the difference between turns is greater than a certain threshold then always choose the turn with the larger count, otherwise carry on straight ahead. A reasonable threshold is the fraction of random turns per record, i.e. 250 ms / 5000 ms = 0.05. A mode 3 turtlebot subtracts the left turn count of the incorrect histogram from the left turn count of the correct histogram, and the same for the right turn count. (Note that the result can be negative, so is no longer a histogram count.) If the difference between the left turn and the right turn is greater than the threshold then the larger turn is always selected. In other words, in the mode 3 turtlebot the action is always determined for each slice for the given dataset and goal room. Mode 3 retains the do-nothing behaviour of mode 2 when in single exit rooms.
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data010.bin 250 5000
ros2 run TBOT01 actor model028_location room5 1000 data009 0 mode003 0.05
ros2 run TBOT01 commander room5 250
./main room_expected data009 room5 17 data010
...
dataset2: data010
z: 45175
n: 43
counts: [1287,447,1387,2157,2621,2386,1876,1084,812,644,708,515,2033,284,191,64,411,673,2138,595,1253,435,2811,163,1499,3268,69,136,913,237,636,76,876,1442,478,758,1007,172,1630,144,533,926,3358]
mean: 1049.6
sqrt(variance): 885.097
sqrt(variance/n): 134.976
sqrt(err1*err1 + err2*err2): 473.894
(mean2-mean1)/sqrt(err1*err1 + err2*err2): -4.389
This run has a highly significant standard score of -4.39. The model 28 mode 3 turtlebot's average journey time is now 4 minutes 22 seconds, plus or minus 34 seconds.
You can view a video of one of mode 3 turtlebot's journeys here. In this journey turtlebot begins in room 1 with a goal of room 6,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env010.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data.bin 250 5000
ros2 run TBOT01 actor model028_location room6 1000 data009 0 mode003 0.05
Note that this example is unusually fast for a 3 room journey at only 1 minute and 4 seconds. The turtlebot more typically tends to travel in the general direction of the correct exit but often fails to pass through it on the first attempt.
Now that we are sure of a definite improvement in the turtlebot's ability to navigate around the turtlebot house, let us compare the performance of the partly conditioned model 28 and the purely induced model 27,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data011.bin 250 5000
ros2 run TBOT01 actor model027 room5 1000 data009 5 mode003 0.05
ros2 run TBOT01 commander room5 250
./main room_expected data009 room5 17 data011
...
dataset2: data011
z: 42400
n: 33
counts: [211,558,1434,843,1469,4057,1193,3029,1015,987,2413,823,398,384,648,290,172,3976,1953,212,5581,496,1606,103,2611,1226,66,888,895,878,1127,21,559]
mean: 1276.42
sqrt(variance): 1277.26
sqrt(variance/n): 222.342
sqrt(err1*err1 + err2*err2): 505.76
(mean2-mean1)/sqrt(err1*err1 + err2*err2): -3.664
The model 27 mode 3 turtlebot has an average journey time of 5 minutes and 19 seconds, plus or minus 56 seconds. Although the lower location accuracy of model 27 tends to increase the journey time, we can still see that a completely unsupervised model - obtained without requiring any label - can produce purposeful behaviour in the case where there are alignments between the sensor variables and the motor and goal variables.
Modes 2 and 3 simply ignore the single exit rooms. Let us create a new substrate substrate005 which adds to the location values extra 'rooms' room2z, room3z and room6z. These form the last 1.5 m of each single exit room's dead end. Rooms room2, room3 and room6 are correspondingly truncated,
./main analyse data009 substrate005
({(location,door12)},2067 % 1)
({(location,door13)},2365 % 1)
({(location,door14)},2012 % 1)
({(location,door45)},1288 % 1)
({(location,door56)},2314 % 1)
({(location,room1)},42708 % 1)
({(location,room2)},13102 % 1)
({(location,room2z)},6873 % 1)
({(location,room3)},10362 % 1)
({(location,room3z)},6748 % 1)
({(location,room4)},45058 % 1)
({(location,room5)},16658 % 1)
({(location,room6)},13108 % 1)
({(location,room6z)},7638 % 1)
The substrate substrate006 adds the redefined room_next variable,
./main analyse data009 substrate006
...
({(room_next,room1)},25554 % 1)
({(room_next,room2)},16927 % 1)
({(room_next,room2z)},10143 % 1)
({(room_next,room3)},26493 % 1)
({(room_next,room3z)},6400 % 1)
({(room_next,room4)},27741 % 1)
({(room_next,room5)},34850 % 1)
({(room_next,room6)},14462 % 1)
({(room_next,room6z)},9659 % 1)
({(room_next,unknown)},72 % 1)
Now when the turtlebot is in room 2, say, it can choose between a correct turn to room1 or an incorrect turn to room2z. Note that there is no requirement to change the model, merely the definitions of the label variables upon which the actions are decided.
Mode 4 is the same as the probabilistic mode 2, but with the substrate 6 and no special single exit handling,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data018.bin 250 5000
ros2 run TBOT01 actor model028_location room5 1000 data009 0 mode004
ros2 run TBOT01 commander room5 250
./main room_expected data019 room5 17 data018
...
dataset: data019
z: 120305
n: 60
counts: [480,1690,4563,1666,930,13587,1299,2698,2560,877,1336,2090,3075,65,238,1109,924,4204,1320,246,2548,7330,4225,159,1261,1294,72,346,1968,1392,3849,79,2489,1900,41,1329,1154,1278,5447,171,5406,416,840,594,244,2102,3658,513,8933,173,1760,160,345,333,174,5623,2357,227,110,2627]
mean: 1998.07
sqrt(variance): 2409.78
sqrt(variance/n): 311.101
dataset2: data018
z: 113517
n: 53
counts: [365,986,3093,8565,1334,6748,2880,2004,3399,2756,805,3445,860,209,123,663,4583,8095,1021,801,2525,7264,1119,959,1417,684,165,3865,1626,644,374,304,530,2750,202,773,1120,113,1292,63,1598,643,1212,741,2697,7060,2590,3054,4627,375,145,1353,2445]
mean: 2057.81
sqrt(variance): 2133.86
sqrt(variance/n): 293.108
sqrt(err1*err1 + err2*err2): 427.43
(mean2-mean1)/sqrt(err1*err1 + err2*err2): 0.139777
In the case of the probabilistic choice mode 4, the new substrate appears to have decreased the performance slightly, but not significantly.
Mode 5 is the same as threshold mode 3, but with the substrate 6 and no special single exit handling,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data015.bin 250 5000
ros2 run TBOT01 actor model028_location room5 1000 data009 0 mode005 0.05
ros2 run TBOT01 commander room5 250
./main room_expected data010 room5 17 data015
...
dataset: data010
room_initial: room5
room_seed: 17
dataset2: data015
dataset: data010
z: 45175
n: 43
counts: [1287,447,1387,2157,2621,2386,1876,1084,812,644,708,515,2033,284,191,64,411,673,2138,595,1253,435,2811,163,1499,3268,69,136,913,237,636,76,876,1442,478,758,1007,172,1630,144,533,926,3358]
mean: 1049.6
sqrt(variance): 885.097
sqrt(variance/n): 134.976
dataset2: data015
z: 57660
n: 72
counts: [231,691,1199,790,2612,1082,934,252,1550,440,495,1067,695,179,496,69,574,405,1947,538,405,630,1062,162,416,2730,77,966,766,331,322,85,523,409,152,356,1612,420,2774,104,543,1821,2386,514,270,1003,1962,1371,577,360,1130,261,545,1377,175,339,503,1049,108,624,1176,304,1299,566,1049,800,326,607,506,1272,446,1186]
mean: 791.708
sqrt(variance): 638.188
sqrt(variance/n): 75.2112
sqrt(err1*err1 + err2*err2): 154.516
(mean2-mean1)/sqrt(err1*err1 + err2*err2): -1.66906
This run is significantly different from the mode 3 run with model 28. The average journey time has decreased to 3 minutes and 18 seconds, plus or minus 19 seconds, which is the quickest of all of these tests of the actor node. Comparison of the mode 3 dataset data010 and the mode 5 dataset data015 shows that the time spent in the single exit rooms has reduced by 4%. Note that this is the case in spite of the fact that model 28 was conditioned on the old definition of the location label. The improvement is less significant over a run of 14 hours,
./main room_expected data010 room5 17 data020
...
dataset2: data020
z: 211517
n: 242
counts: [610,898,1401,1320,1802,1032,888,1110,1116,242,958,312,266,68,1827,82,53,2114,774,616,398,1444,1264,59,3662,2789,168,1003,965,650,1762,346,382,594,76,606,399,662,970,600,399,826,951,700,970,2234,729,1489,905,176,267,78,272,220,978,1643,785,350,911,1190,1577,582,1224,634,960,4916,285,692,508,1214,1256,525,231,2242,426,665,2282,424,75,331,704,123,1333,484,1886,348,565,146,2759,1683,82,531,139,1489,607,510,1309,317,883,544,706,2538,765,1514,890,72,1,113,834,1384,206,559,948,724,866,758,1989,97,659,1935,541,335,527,513,436,161,1137,1582,597,288,2696,935,1618,1417,224,572,1204,669,2809,325,142,189,530,892,238,327,765,178,222,32,421,446,220,1445,93,1696,1855,108,820,378,818,684,702,38,445,612,165,2895,648,855,562,1473,69,709,425,467,254,285,573,3855,764,835,329,2408,224,319,395,844,1107,971,1122,2602,661,521,624,1501,1245,1473,137,866,480,3756,2573,433,980,398,72,528,759,750,703,1024,402,448,1573,2161,93,511,244,688,756,412,790,291,837,467,852,1108,736,165,213,1083,94,1708,747,484,851,2495,2621,140,3150,345]
mean: 873.537
sqrt(variance): 778.033
sqrt(variance/n): 50.0138
sqrt(err1*err1 + err2*err2): 143.944
(mean2-mean1)/sqrt(err1*err1 + err2*err2): -1.22317
Here the average journey time is 3 minutes and 38 seconds plus or minus 13 seconds.
Lastly we re-run model 27 in mode 5,
gazebo -u --verbose ~/turtlebot3_ws/src/TBOT01_ws/env009.model -s libgazebo_ros_init.so
ros2 run TBOT01 controller data016.bin 250 5000
ros2 run TBOT01 actor model027 room5 1000 data009 5 mode005 0.05
ros2 run TBOT01 commander room5 250
./main room_expected data011 room5 17 data016
...
dataset: data011
z: 42400
n: 33
counts: [211,558,1434,843,1469,4057,1193,3029,1015,987,2413,823,398,384,648,290,172,3976,1953,212,5581,496,1606,103,2611,1226,66,888,895,878,1127,21,559]
mean: 1276.42
sqrt(variance): 1277.26
sqrt(variance/n): 222.342
dataset2: data016
z: 54186
n: 38
counts: [209,1062,1057,2963,4093,2466,1076,596,1725,1197,1462,968,414,159,448,449,2672,2020,1851,856,1910,2127,1526,212,2225,1013,361,214,519,1762,1950,141,1877,867,444,3331,2492,310]
mean: 1342.74
sqrt(variance): 975.122
sqrt(variance/n): 158.186
sqrt(err1*err1 + err2*err2): 272.871
(mean2-mean1)/sqrt(err1*err1 + err2*err2): 0.243018
The average journey time increases a little to 5 minutes and 35 seconds, but this is not significantly different from the mode 3 run of model 27. A much longer run would be required to demonstrate any difference.
This table summarises the results,
| model | mode | rooms | mean | std err |
|---|---|---|---|---|
| none | random | 55 | 3129 | 454 |
| model028_location | 1 | 75 | 2503 | 341 |
| model028_location | 2 | 60 | 2409 | 311 |
| model028_location | 3 | 43 | 1049 | 134 |
| model027 | 3 | 33 | 1276 | 222 |
| model028_location | 4 | 53 | 2057 | 293 |
| model028_location | 5 | 242 | 873 | 50 |
| model027 | 5 | 38 | 1342 | 158 |
There are many possible ways to improve the performance of TBOT01. We could experiment with various parameters -
-
turtlebot controller parameters, e.g. the random-turn interval, or the mode 3/5 turn threshold.
-
substrate parameters, e.g. the bucketing of the
scanvalues, or thesubstrate005definition oflocation -
modelling parameters to improve likelihoods or label accuracies
-
environment parameters, e.g. more furniture in rooms, or less regular shapes, to make it easier to identify location
Another method is to acquire more random-turn experience. Even without a new model, larger slice histograms would allow for more accurate action decisions.
In addition, the datasets generated by an actor's runs could become the dataset given to a re-run of the actor recursively, as mentioned above.
Larger random-turn or actor histories would allow for new models that have larger decompositions with more leaf slices. This is the case whether the model is induced, or partially or wholly conditioned on location or some other label variable.
More history might reveal alignments between the timewise frames of past scan variables and the past motor variable. In this way, a short term memory might also improve performance in rooms that are easily confused in the current frame, but were distinguishable a few frames ago; or where the walls are out of range of the lidar in the current frame, but were not a short time in the past.
Another possible improvement would be to redefine the location label to give it more resolution. For example, its values could represent (i) a house coordinate, e.g. to the nearest metre, and (ii) an orientation, e.g. to the nearest 30 degrees. The motor action decision, given the goal room, would tend to move/rotate the turtlebot to the next coordinate/orientation that is closest to the correct exit. A model could also be conditioned on the new location variable.
Alternatively we could replace the future label, room_next, with a set of future room variables each with a value representing the bucketed number of events to attainment. Then the motor decision would be the action with the fewest steps given the desired next room.